

Master-slave control-based hand function reconstruction device and implementation method thereof
A function and hand technology, applied in the field of hand function reconstruction devices, can solve problems such as muscle fatigue and lack of flexibility, and achieve the effects of avoiding muscle fatigue, strengthening real-time control, and speeding up recovery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The invention will be described in further detail below in conjunction with the accompanying drawings.
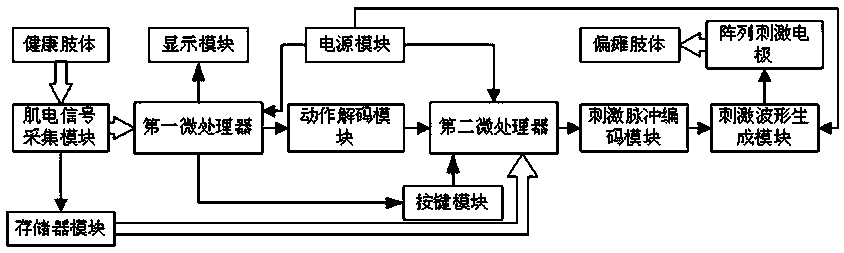
[0030] The present invention proposes a hand function reconstruction device and method based on a master-slave rehabilitation strategy, that is, the action potential sequence generated by the corresponding muscle contraction when the uninjured hand moves is used as the electrical stimulation channel, stimulation pulse width, and stimulation intensity of the ipsilateral muscle The source of control, so that the muscle contraction after electrical stimulation is closer to the muscle contraction of the normal hand movement, so that the affected hand moves like the healthy hand, and the functional reconstruction of the affected hand is realized through continuous electrical stimulation. The overall structure block diagram of the device is as follows: figure 1 As shown, the hand function reconstruction device is mainly composed of a myoelectric signal acquisition module, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More