

Object detection method based on depth reinforcement learning
A technology of reinforcement learning and object detection, applied in image enhancement, image data processing, instruments, etc., can solve problems such as single image occlusion or partial shooting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention proposes an object detection method based on deep reinforcement learning, which will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0057] The present invention proposes an object detection method based on deep reinforcement learning, which is applicable to any general-purpose mobile robot equipped with any type of RGB camera. This embodiment uses a turtlebot robot equipped with a Kinect for Xbox camera. This embodiment is only used to illustrate the method of use of the present invention, and does not constrain the claims of the present invention.
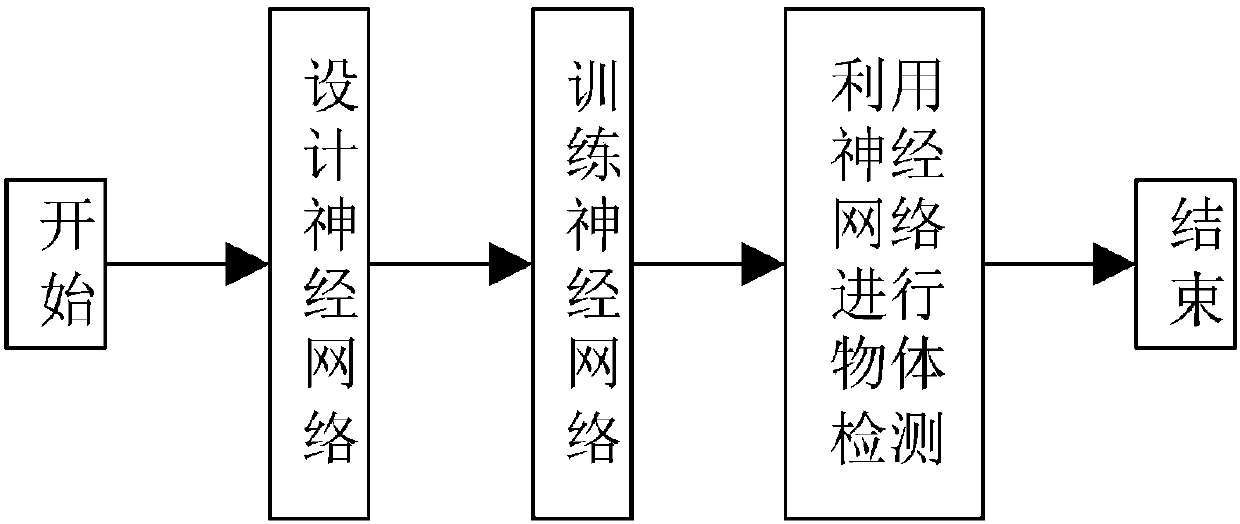
[0058] The present invention proposes an object detection method based on deep reinforcement learning, the overall process is as follows figure 1 shown, including the following steps:
[0059] 1) Construct a deep reinforcement learning neural network Q, including five parts: image feature extraction network, image feature dimensionality r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More