

Cross-ratio-invariance-based linear-array camera calibration method containing eight-diagram coding information
A line-scan camera and coding information technology, which is applied in image data processing, instrumentation, computing, etc., can solve the problems of small quantity, movement accuracy affecting calibration accuracy, and affecting the accuracy and stability of calibration results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0062] In this embodiment, a line-scan camera whose model is E2V EV71YUM2GE2010-BA0 is taken as an example, and the line-scan camera calibration method containing gossip coding information based on cross-ratio invariance of the present invention is used to calibrate the line-scan camera.
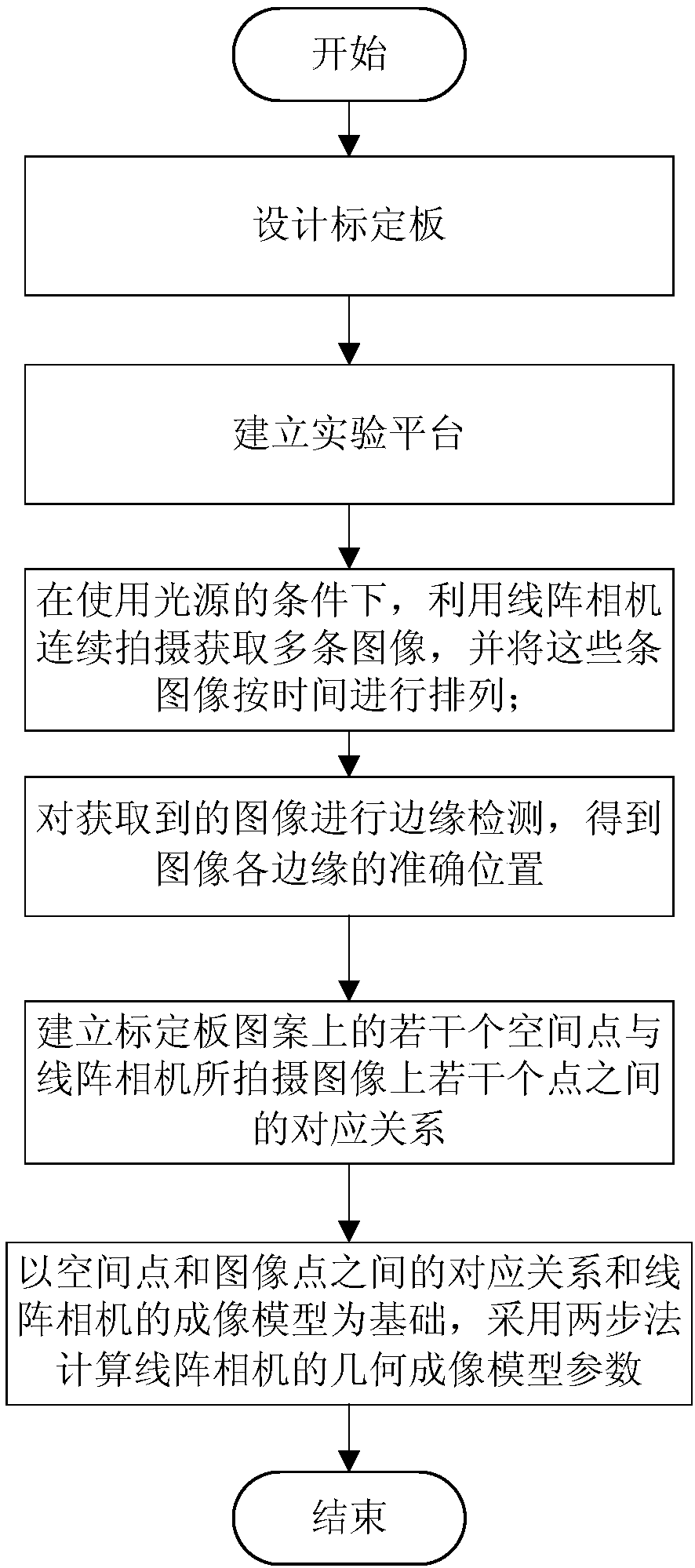
[0063] A calibration method for line array cameras containing gossip coding information based on cross-ratio invariance, such as figure 1 shown, including the following steps:
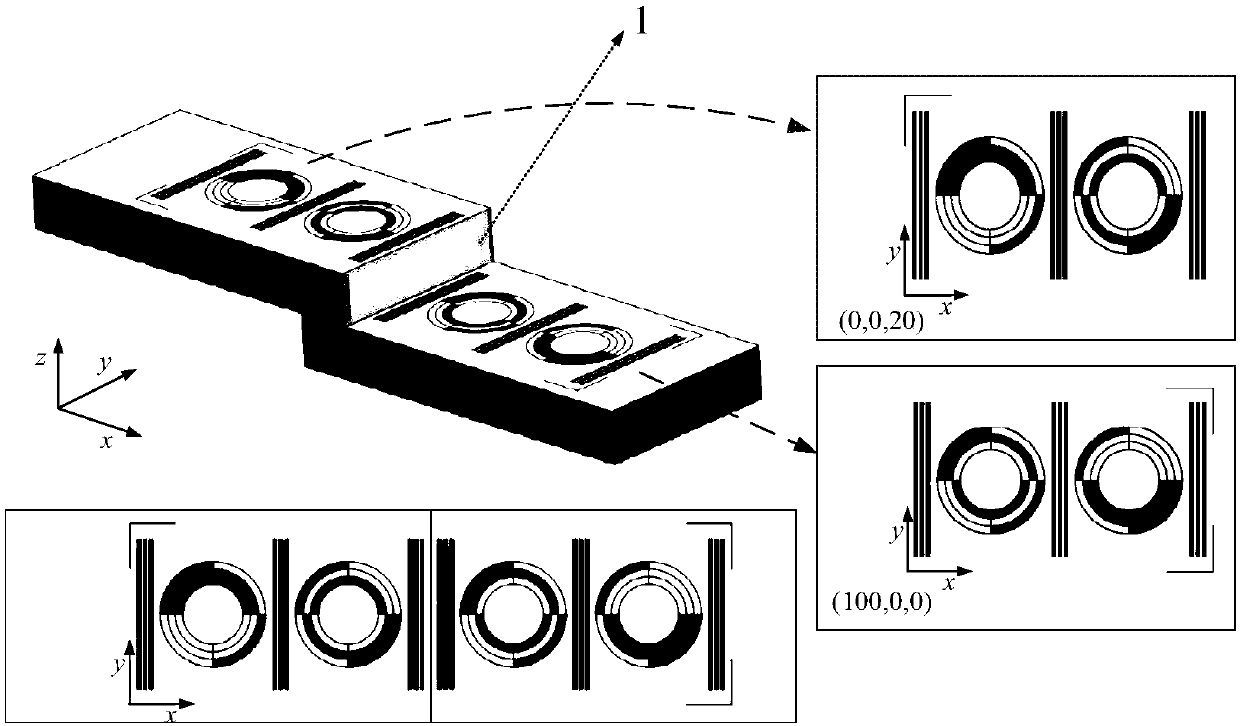
[0064] Step 1. Design the calibration board, such as figure 2 As shown, the calibration plate is a three-dimensional calibration plate composed of two parallel planes with different heights. The pattern on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More