

Quadrotor unmanned aerial vehicle parameter identification method based on extreme value search algorithm
A technology of quadrotor UAV and search algorithm, which is applied in the field of parameter identification of quadrotor UAV based on extreme value search algorithm, can solve the problems of unknown physical parameters of quadrotor UAV and inaccurate measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0080] Taking the take-off state of the UAV as an example, implement the parameter identification method of the quadrotor UAV based on the extreme value search algorithm in the patent.
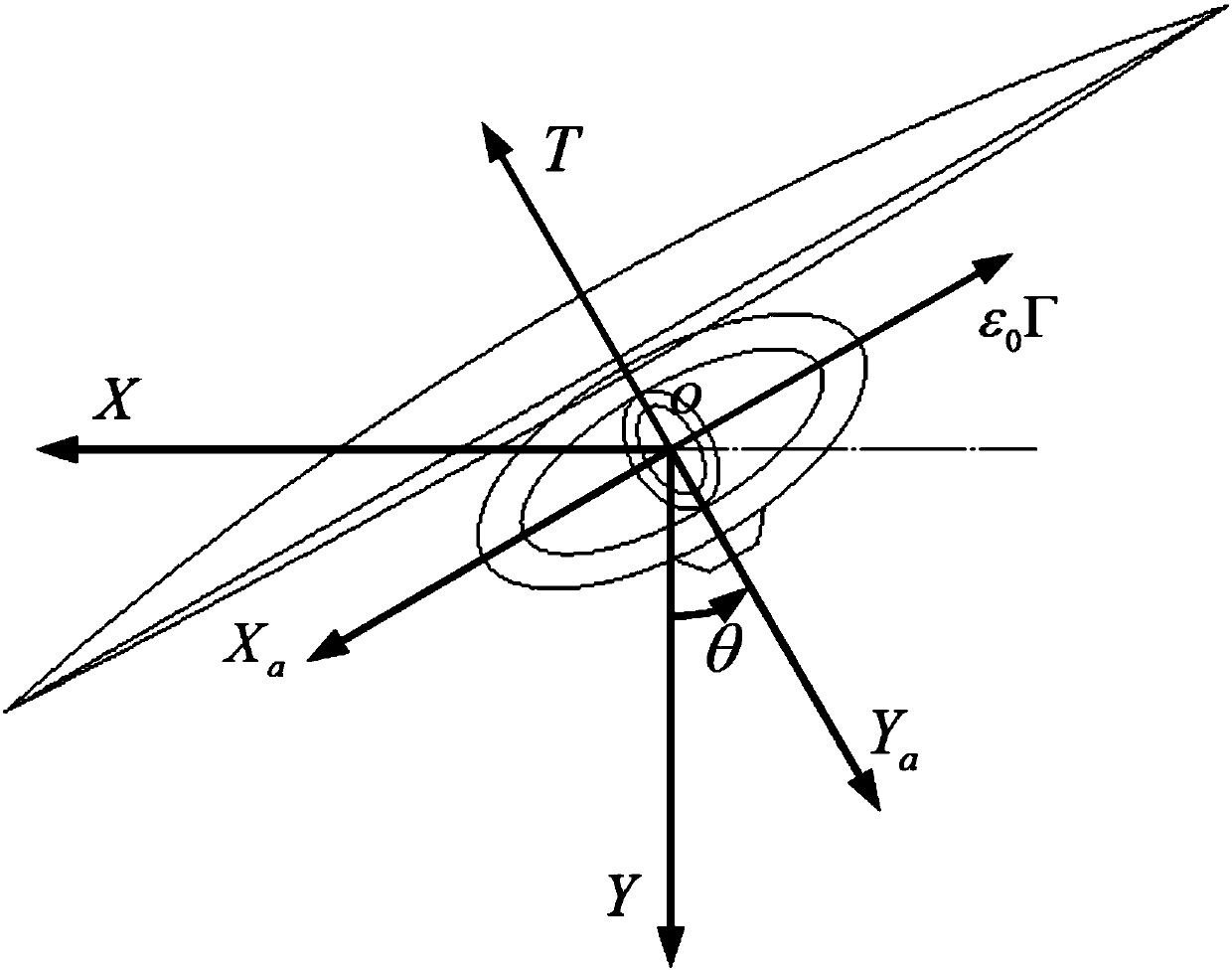
[0081] The first step is to establish a dynamic model of the UAV based on the mechanism modeling method.
[0082] According to the force balance analysis and Lagrange operator analysis of the quadrotor UAV in the take-off stage, a simplified quadrotor UAV take-off stage model can be obtained:
[0083]
[0084] The second step is to select the relevant parameters to be identified according to the established model.
[0085] In the quality measurement of quadrotor UAV, the use of high-precision pressure gauge can be satisfied. Regarding the measurement of the center of gravity of the quadrotor and the center of gravity of the blade, there are usually three methods: direct measurement method, weighing method and suspension method. The direct measurement method is mainly aimed at objects with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More