

Indoor mobile robot autonomous exploration method based on laser radar
A mobile robot and laser radar technology, applied in the direction of instruments, electromagnetic wave re-radiation, measuring devices, etc., can solve the problems of inability to effectively describe the closed-loop characteristics of the environment, the accuracy cannot be effectively guaranteed, and the efficiency of robot exploration is reduced. Independently explore the effects of efficiency, reduced requirements, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
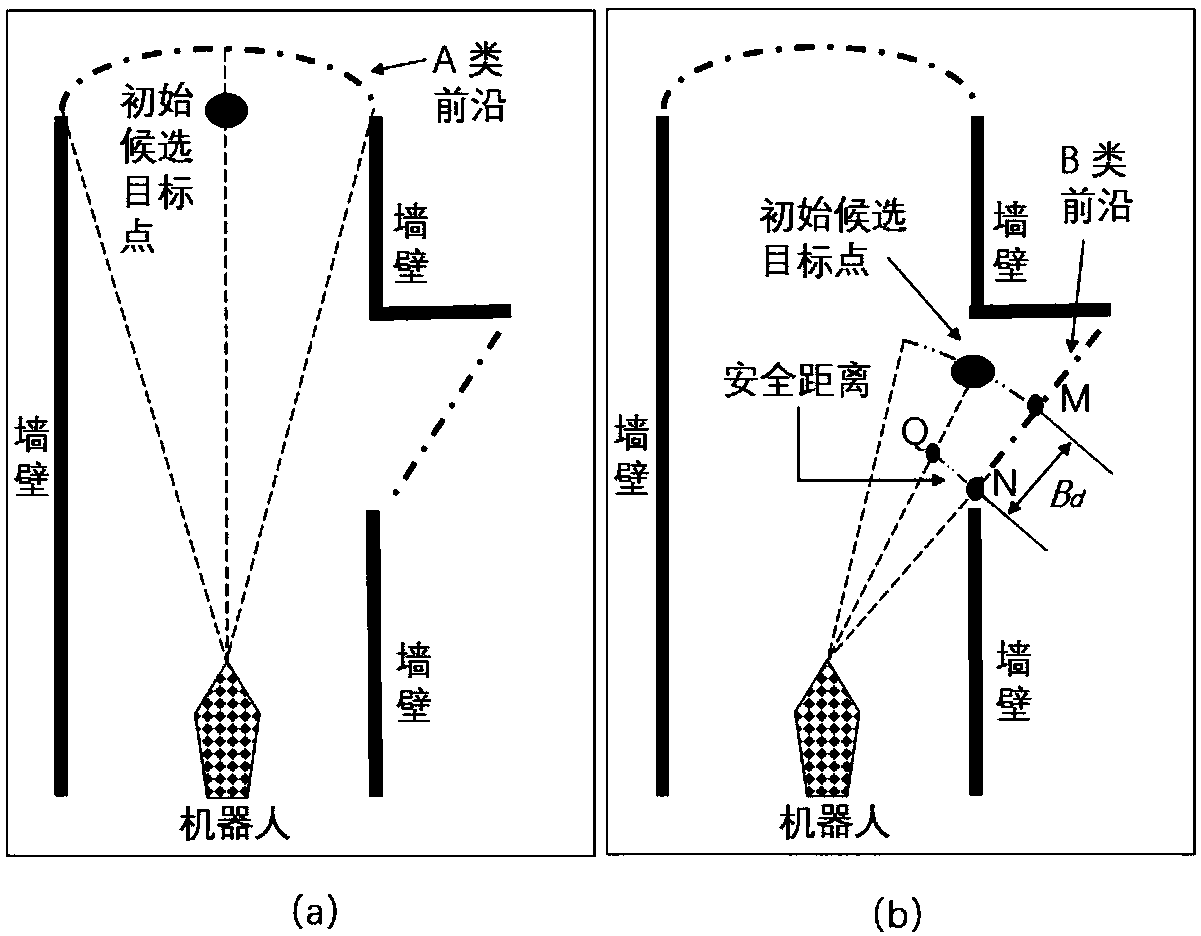
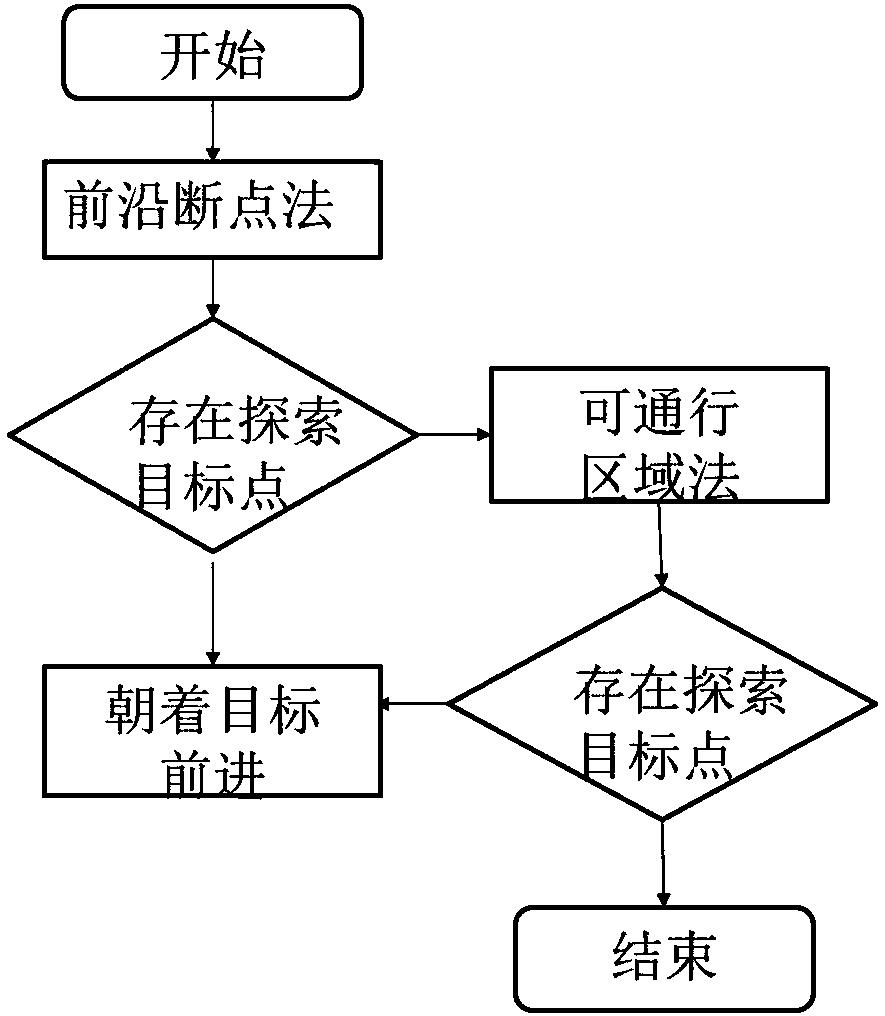
[0021] 1) frontier breakpoint method;
[0022] Using the frontier breakpoint method, the laser frontier is divided into two types: A and B: the A-type frontier is at the maximum range of the sensor, and the arc length is greater than the width of the mobile robot; the B-type frontier is at the breakpoint caused by obstacles, and the The absolute value of the distance information difference between two adjacent laser data at the point is greater than a safety threshold. The frontier breakpoint method generates candidate exploration target points at both frontiers A and B. figure 1 The principle of extracting two types of exploration target points by the frontier breakpoint method is briefly illustrated.
[0023] The geometric rules for generating class A candidate exploration target points are as follows:
[0024] a. Connect the midpoint of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More