

Simultaneous calibration of multiple mimu errors based on lever arm compensation and positive and negative multiplication rates
A lever arm, rate technology, applied in the field of error calibration, can solve problems such as accuracy decline
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
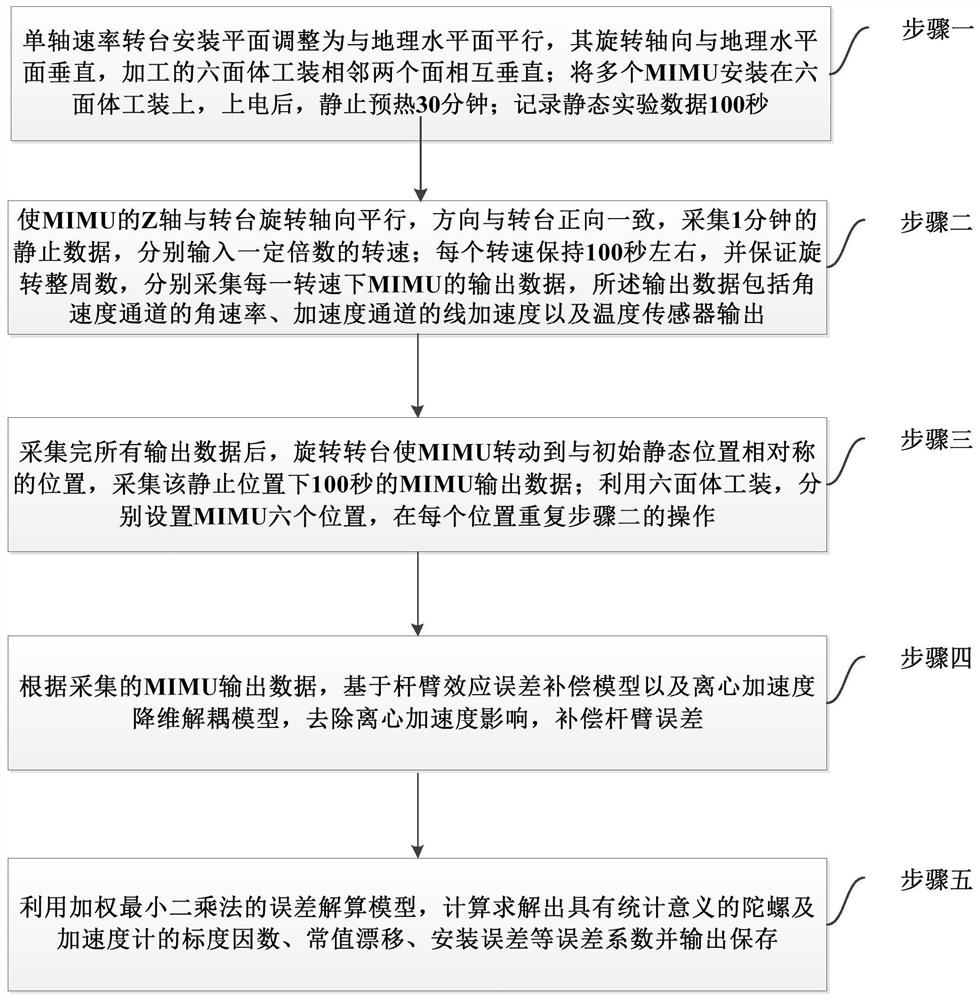
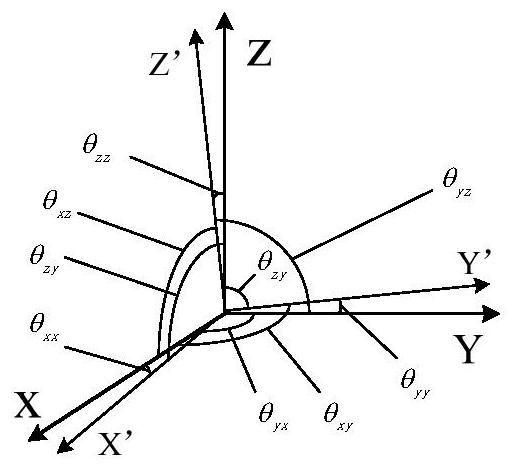
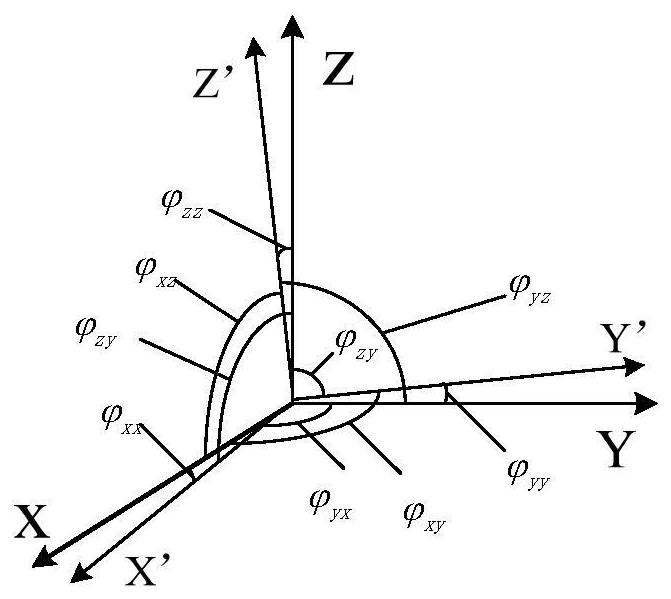
[0088] Embodiment 1 of the present invention is a micro-miniature inertial measurement system (Micro Inertial Measurement Unit, MIMU) designed based on a micro-electro-mechanical system (Micro-Electro-Mechanical System, MEMS), including a micro-miniature gyroscope, an accelerometer, a barometer, an electronic compass, etc. The sensor, through the movement of the carrier, generates information such as angular velocity and acceleration to achieve the purpose of measuring the movement of the carrier. Aiming at the problem that its installation error is relatively large compared with the traditional inertial measurement unit, according to the analysis of the influence mechanism of the corresponding lever arm effect and combined with the mathematical statistical model of error drift, a calibration method using a single-axis rate turntable and a hexahedron tooling is designed by applying the weighted least square method , can offset the error effects of ground speed and gravity, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More