

Adaptive Integral Sliding Mode Control Method for Mobile Robot
A technology of mobile robot and integral sliding mode, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as model parameter uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
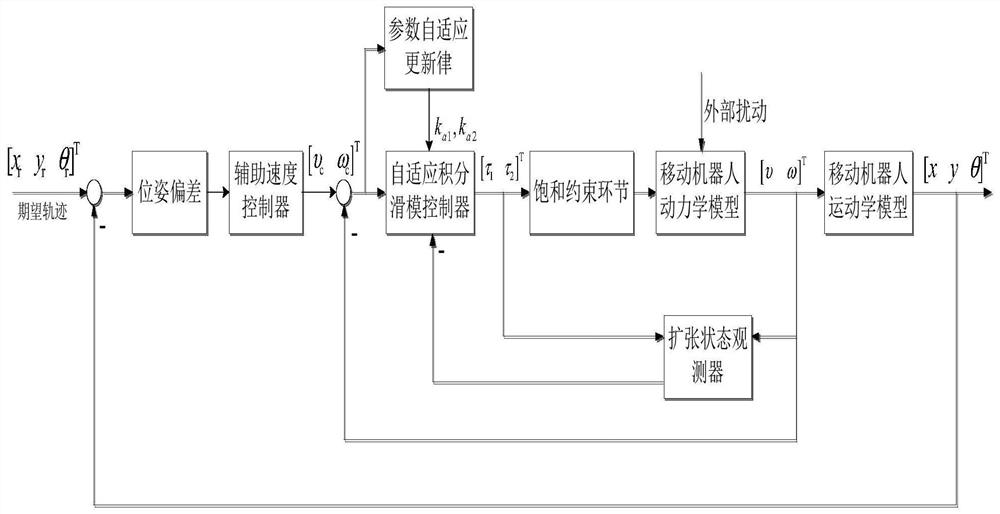
[0083] like figure 1 — Figure 5 As shown, the adaptive integral sliding mode control method for mobile robots includes the following steps:
[0084] (1) Establish a mobile robot tracking control system model considering actuator saturation compensation. The specific process is as follows:
[0085] (1.1), the kinematics and dynamics model of the wheeled mobile robot can be expressed as
[0086]
[0087]
[0088] In the formula, q=[x y θ] T ∈R 3 Represents the pose vector of the mobile robot, where [x y] is the coordinate of the reference point of the mobile robot in the coordinate system, and θ is the direction angle of the mobile robot; η=[υ ω] T ∈R 2 Represents the velocity vector of the robot, which consists of the linear velocity and angular velocity of the mobile robot, where υ is the linear velocity and ω is the angular velocity; M(q...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More