

A finite-time parameter identification and position synchronization control method for multi-manipulator systems based on cross-coupling
A time-limited, cross-coupling technology, used in adaptive control, general control systems, control/regulation systems, etc., and can solve problems such as poor synchronous control performance and low parameter identification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings.
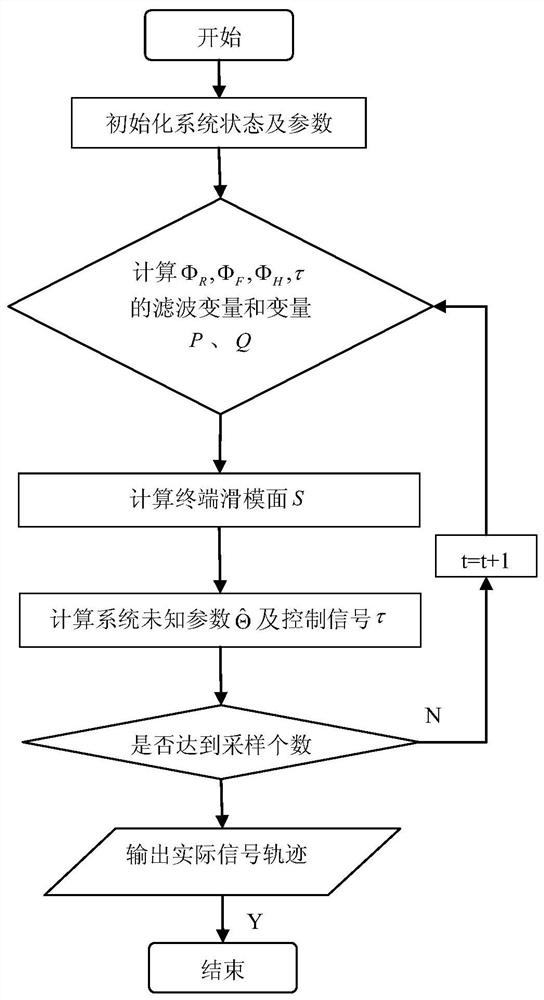
[0073] refer to Figure 1-Figure 7 , a method for finite-time parameter identification and position synchronization control of a multi-manipulator system based on cross-coupling, the control method comprising the following steps:
[0074] Step 1, establish multi-manipulator dynamic model;
[0075] A multi-manipulator dynamic system model consisting of n m-joints is expressed in the following form:
[0076]
[0077] where n is the number of manipulators, m is the number of joints of each manipulator, are respectively the joint angle position vector, velocity vector and acceleration vector of the mechanical arm, M(q)=diag([M 1 (q) … M n (q)]) is the positive definite inertia matrix of the manipulator, represents the centrifugal force and the Coriolis force matrix, is the gravity vector acting on the joint, Enter the torque vector for the joint control;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More