

Chaotic trajectory tracking method with pole assignment improved
A trajectory tracking and pole configuration technology, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems that the trajectory tracking error cannot converge to zero, the system cannot be stable, and the impact cannot be ignored, so as to eliminate chattering Phenomenon, fast response, good robustness effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] Taking the 3D Lorenz chaotic system as an example, the trajectory tracking control is carried out.
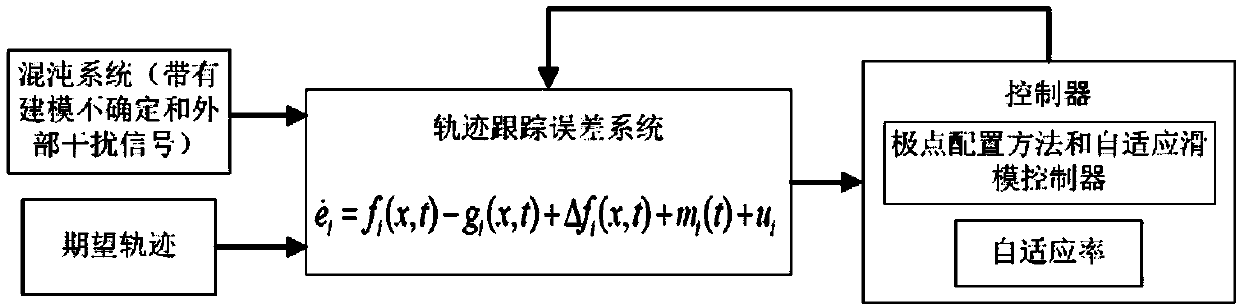
[0064] Step 1: According to the state equation and expected trajectory of the chaotic system, establish a trajectory tracking error system, including steps 1.1 to 1.3:
[0065] Step 1.1: The state equation of the chaotic system is: the chaotic system is a Lorenz chaotic system, that is, a 3-dimensional chaotic system. The state equation of the Lorenz chaotic system is:
[0066]
[0067] Among them, the parameter x i is the state variable of the system, i=1,2,3, x=[x 1 ,x 2 ,x 3 ] T . When a=10, b=28, c=8 / 3, the Lorenz chaotic system enters the chaotic state.
[0068] with modeling uncertainty △f i (x,t) and external interference signal m i The Lorenz chaotic system of (t) is expressed as
[0069]
[0070] Formula (14) is a chaotic system. The initial state of the chaotic system is set to x 1 (0)=-2.5,x 2 (0)=-1.4,x 3 (0)=5. In equation (14), the mode...
Embodiment 2
[0100] Taking the 4-dimensional hyperchaotic Chen system as an example, the trajectory tracking control is carried out.
[0101] Step 1: According to the state equation and expected trajectory of the chaotic system, establish a trajectory tracking error system, including steps 1.1 to 1.3:
[0102] Step 1.1: The state equation of the hyperchaotic Chen system is:
[0103]
[0104] Among them, the parameter x i is the state variable of the system, i=1,2,3,4, x=[x 1 ,x 2 ,x 3 ,x 4 ] T . when a 1 =35, b 1 = 3,c 1 = 12, d 1 =7, r 1 = 0.16, the hyperchaotic Chen system is in a hyperchaotic state.
[0105] with modeling uncertainty △f i (x,t) and external interference signal m i The hyperchaotic Chen system of (t) is expressed as:
[0106]
[0107] Formula (26) is the hyperchaotic system. The initial state of the hyperchaotic system is set to x 1 (0)=2, x 2 (0)=-1,x 3 (0)=3, x 4 (0)=1. In Equation (26), the modeling uncertainty △f i (x,t) is set as:
[010...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More