

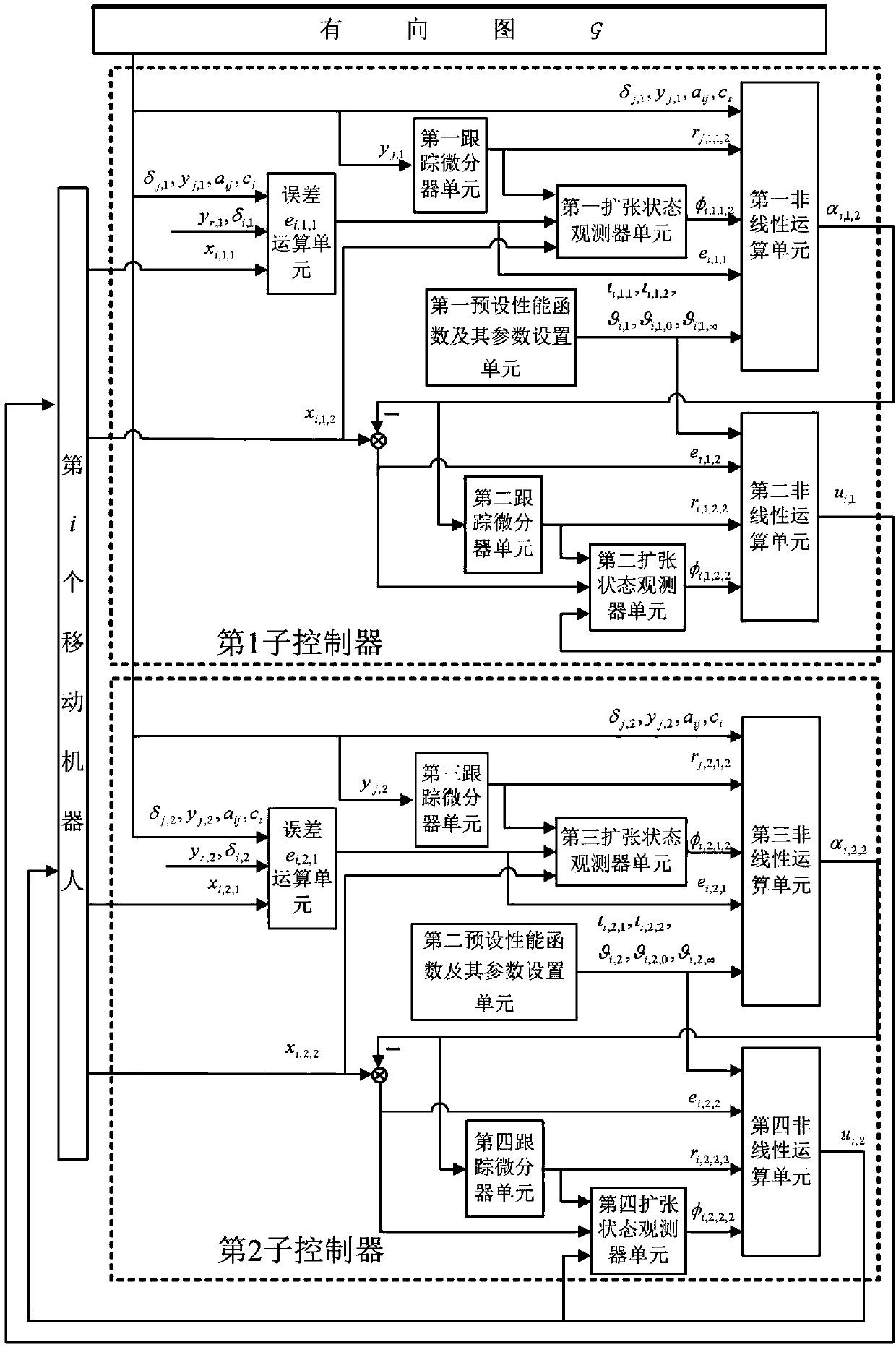
Default performance formation controller structure for multi-mobile robots and design method
A mobile robot with preset performance technology, applied in non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., to overcome the explosion of computational complexity, solve system uncertainty, and improve accuracy and speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0177] The state equation of the ith mobile robot system among the followers selected in this embodiment is:
[0178]
[0179] In the formula, (y i,1 ,y i,2 ) is the coordinates of mobile robot i, u i,1 , u i,2 is the control force, that is, the control quantity; f i,1,1 (x i,1,1 ,x i,1,2 )=x i,1,2 , f i,2,1 (x i,2,1 ,x i,2,2 )=x i,2,2 , m i is the mass of mobile robot i, which is 1kg, and is the damping coefficient, generally 1; and is the coefficient to control the transient response of mobile robot i, generally 9; the initial values of the four follower system states are:
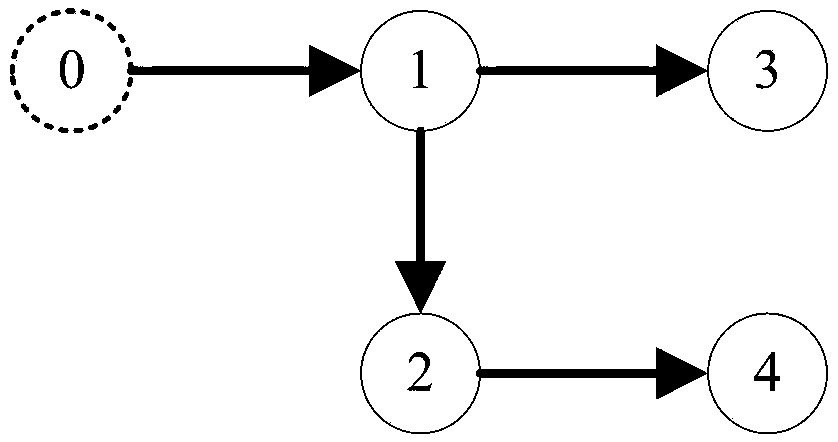
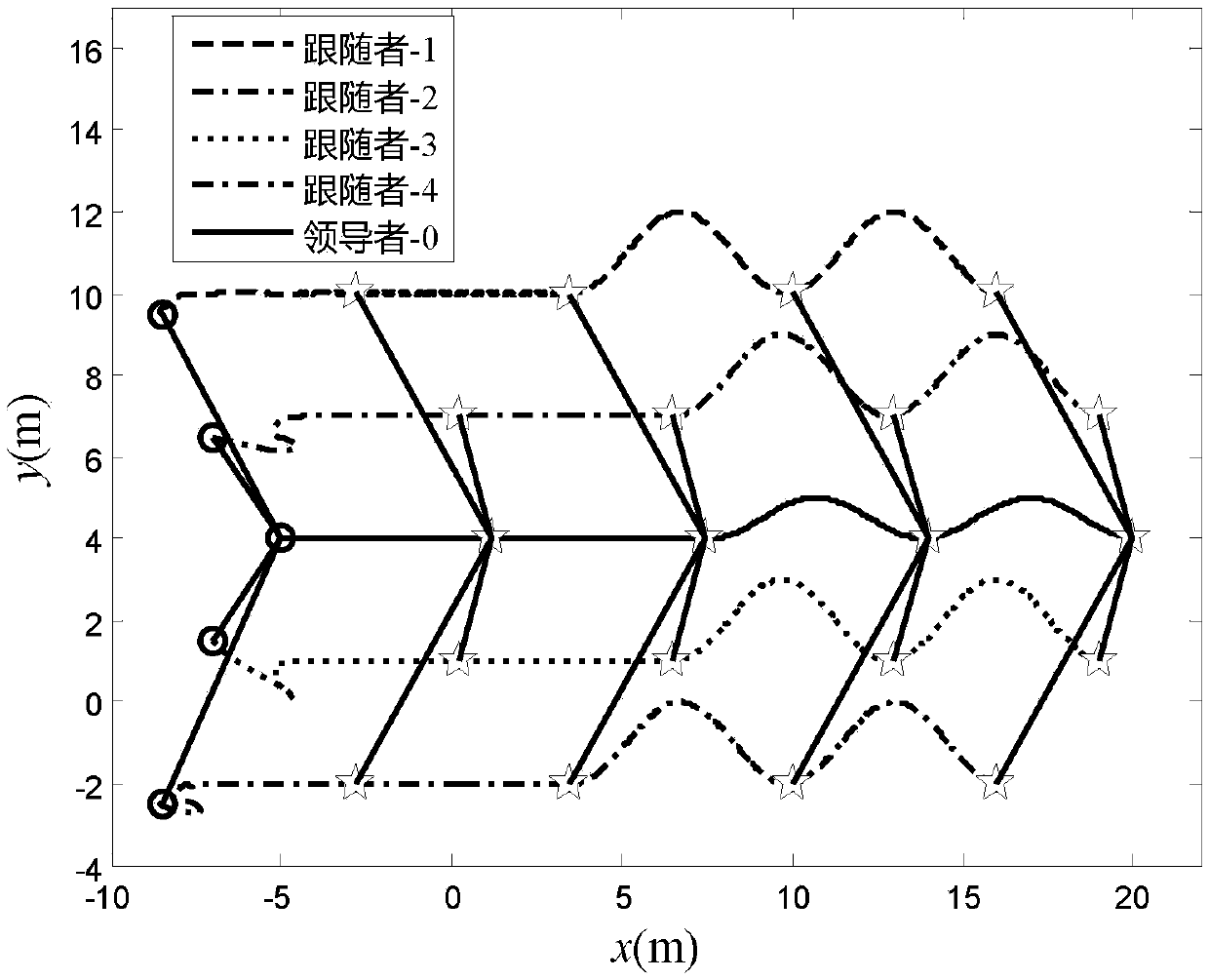
[0180] Consider a multi-agent network composed of 4 followers and 1 leader, and at least one follower communicates with the leader. The communication topology is as follows figure 2 As shown, where 0 is the number of the leader, and 1, 2, 3, and 4 are the numbers of the four followers. Further, the Laplacian matrix can be obtained, and the Laplacian matrix is as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More