

Grabbing point positioning method for naturally placed grape bunches on basis of machine vision
A technology of machine vision and point positioning, which is applied in the direction of neural learning methods, instruments, harvesters, etc., can solve the problems of various shapes and irregular distribution of grape bunches, achieve accurate and fast extraction, and improve the effect of image quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
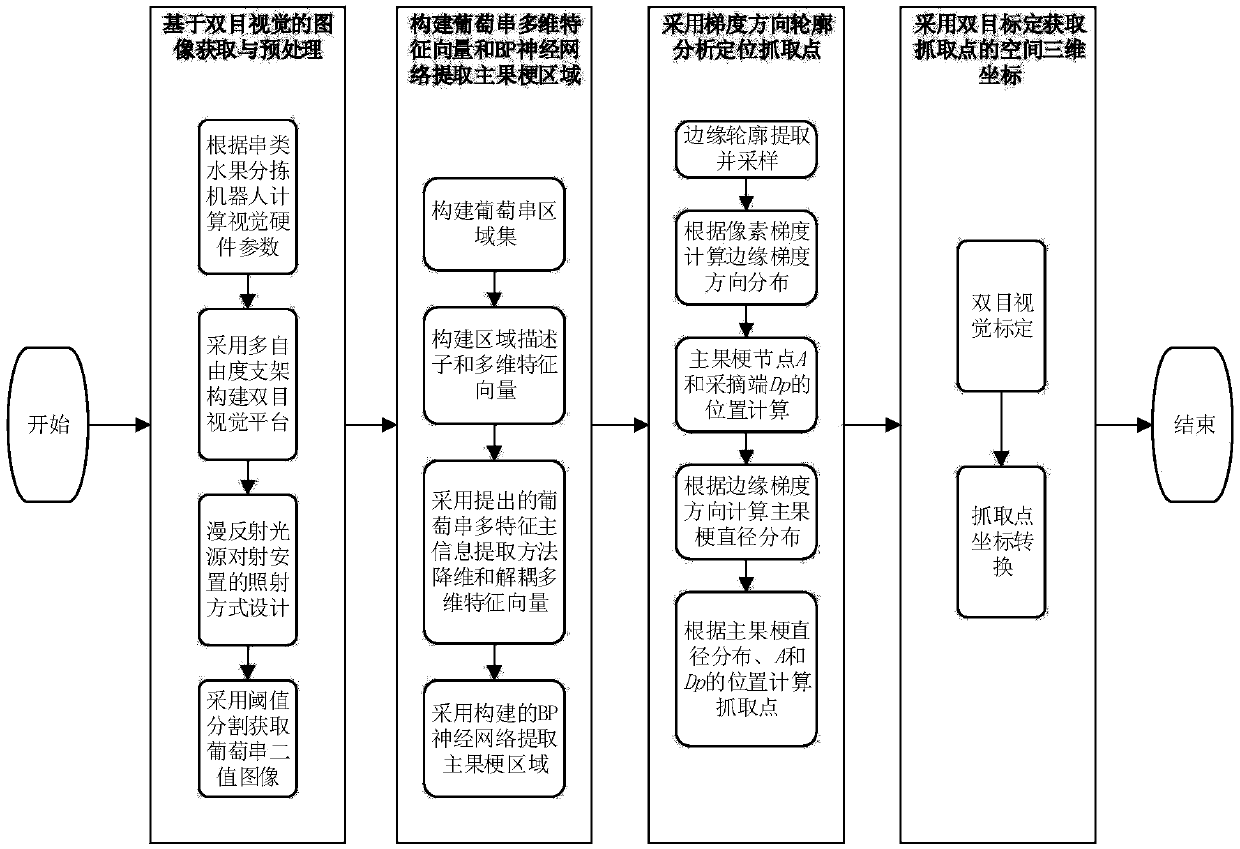
[0078] The present invention emphatically proposes a grape bunch grasping point positioning method based on machine vision based on multi-feature and gradient direction contour analysis, which solves the problem that the main fruit stalk of the grape bunch naturally placed has no shape and position constraints, and it is difficult to directly identify the main fruit in the image through the feature threshold. At the same time, the extraction accuracy and speed of the main fruit stem are greatly affected by the size of the feature and the coupling between features, and it is difficult to directly perform geometric fitting and diameter calculation on the outline of the main fruit stem. question.
[0079] Specific embodiments are described by taking the string fruit sorting robot developed by our research group as an example, and white rosa grapes as the grasping objects. Its specific implementation is as follows:
[0080] 1. Image acquisition and preprocessing based on binocula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More