

Guide vector correlation and local focusing combined angle measurement method
A technology of steering vector and angle measurement, which is applied in the direction of measuring angle, measuring device, radio wave measuring system, etc. It can solve problems such as poor angle measurement effect, error in defuzzification algorithm, and decrease in angle measurement performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0073] In this embodiment, the array antenna is a multi-element linear array, and the angle measurement method provided by the present invention will be described in detail by taking the M-element linear array as an example.
[0074] When the array antenna is an M-element line array, the angle measurement method provided by the present invention is specifically:
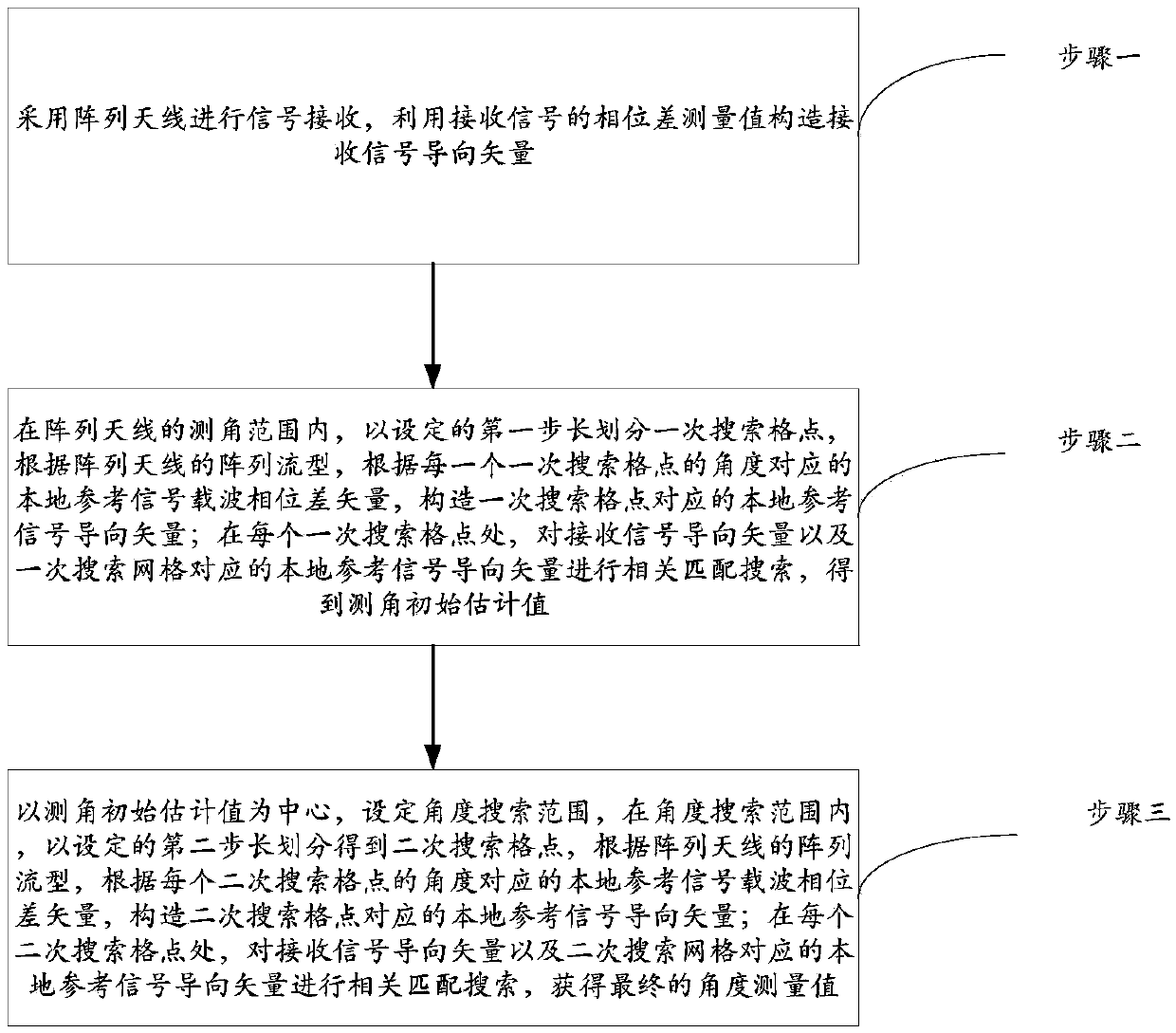
[0075] Step 1. The array antenna is used for signal reception, and the phase difference measurement value of the received signal is used to construct the steering vector of the received signal.
[0076] This step one includes the following specific steps:
[0077] S101: The received signal of the M-element linear array includes N measured values, and N steering vectors A are constructed according to the N measured values s (θ,n):
[0078]
[0079] Where θ is the target incident angle; m=1,2,...,M; n=1,2,...,N.
[0080] φ m,n (θ) = πh m sinθ+Δφ m,n is the carrier phase difference measurement value of the nth ...
Embodiment 2
[0123] In this embodiment, the carrier wavelength λ=3cm is set, the antenna array is a four-baseline non-equidistant linear array of M=4, and the antenna element spacing d m =λ / 2·[-15,-5,5,15]. An angle measurement operation is performed in 1 ms, and the number of samples of raw data measurement values is N=1000. Set the incident angle of the stationary target to 60°, the length of the first step to 0.1°, and the initial value preset threshold ξ=1°. The second step size is 0.01°, the second search range parameter θ range = 0.2°. The carrier phase error follows a Gaussian white noise distribution with a standard deviation of 10°.
[0124] Step 1: Store N=1000 array received signal carrier phase difference measurements, and construct the received signal steering vector A s (θ,n):
[0125]
[0126] In formula (13), φ m,n (θ) = πh m sinθ+Δφ m,n , m=1,2,3,4 means the carrier phase difference measurement value of the nth observation sample of the mth measurement channel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More