

Mechanical arm obstacle avoidance path planning method and device and storage device
A technology of path planning and manipulators, which is applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as path planning that does not consider real-time obstacle avoidance, and related methods cannot be generally applied to complex scenes, etc., to improve path tracking accuracy , Reduce mechanical vibration, avoid collision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
[0044] Embodiments of the present invention provide a robot arm obstacle avoidance path planning method, device and storage device.
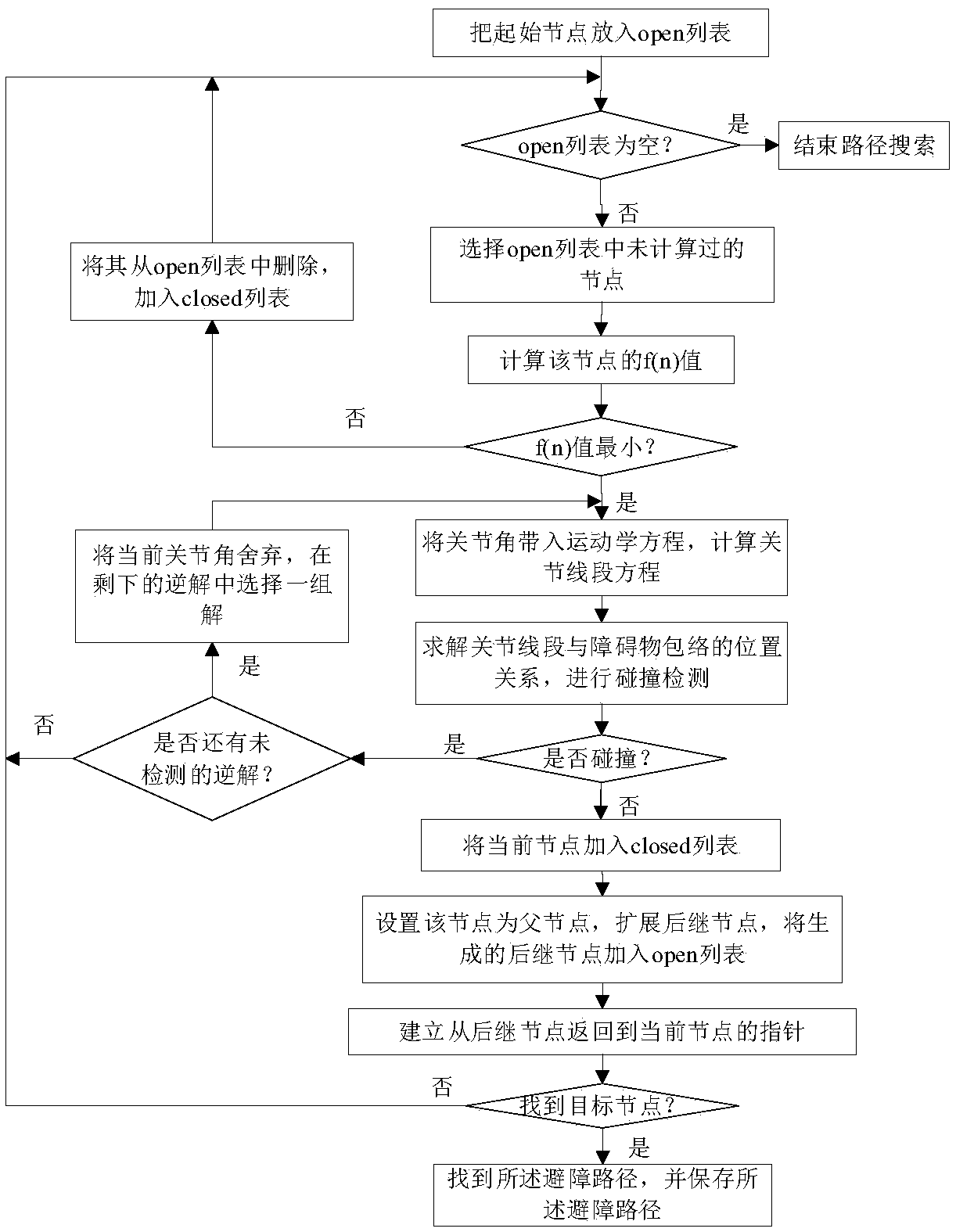
[0045] Please refer to figure 1 , figure 1 It is a flow chart of a robotic arm obstacle avoidance path planning method in an embodiment of the present invention, specifically including the following steps:
[0046]S101: Obtain the pose data of the operation target and the obstacle through the external sensor in the robot arm, use the initial position of the end of the robot arm as the starting node of the obstacle avoidance path planning, and use the position of the operation target as the obstacle avoidance The target node of path planning;
[0047] S102: Use the C space method to per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More