

An autonomous calibration platform for modular joint torque sensors
A torque sensor and modular joint technology, which is applied in the calibration/testing of force/torque/power measuring instruments, instruments, measuring devices, etc., can solve the problem of low accuracy of input torque values, small amount of collected data, and impossibility of dynamic testing and other problems to achieve the effect of improving the accuracy of the fitting curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
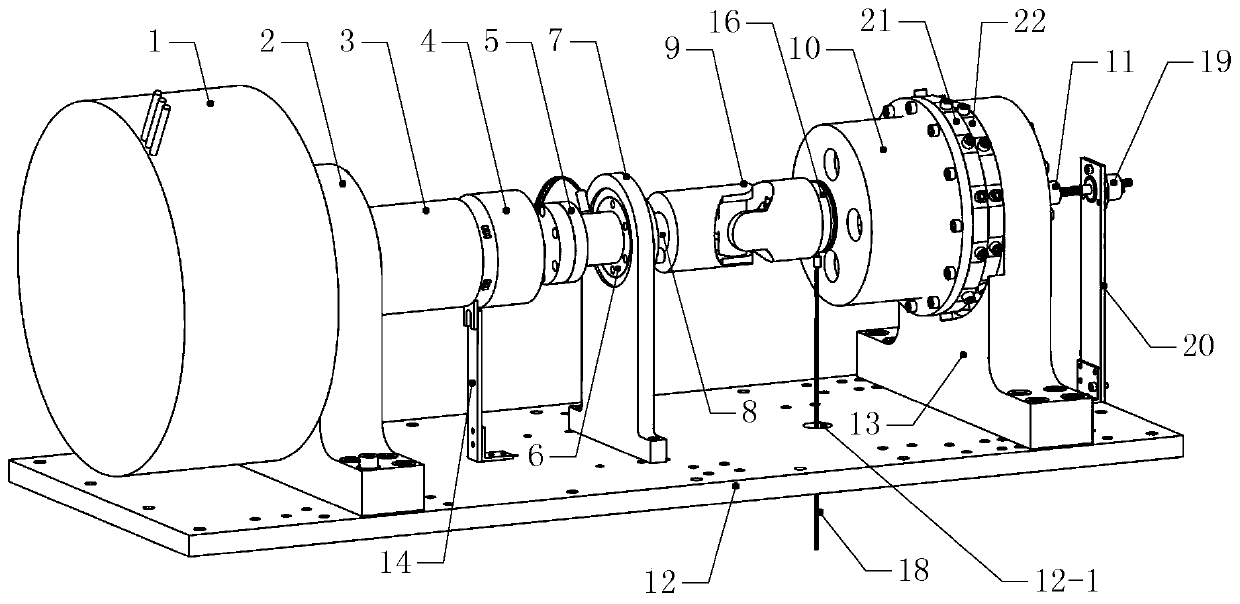
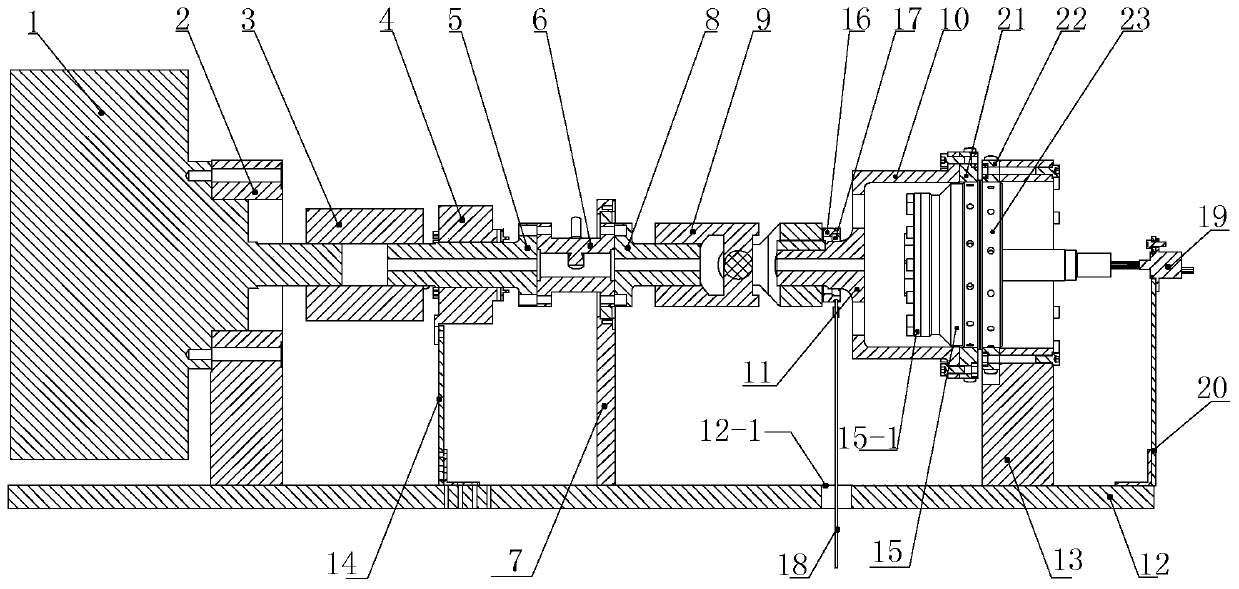
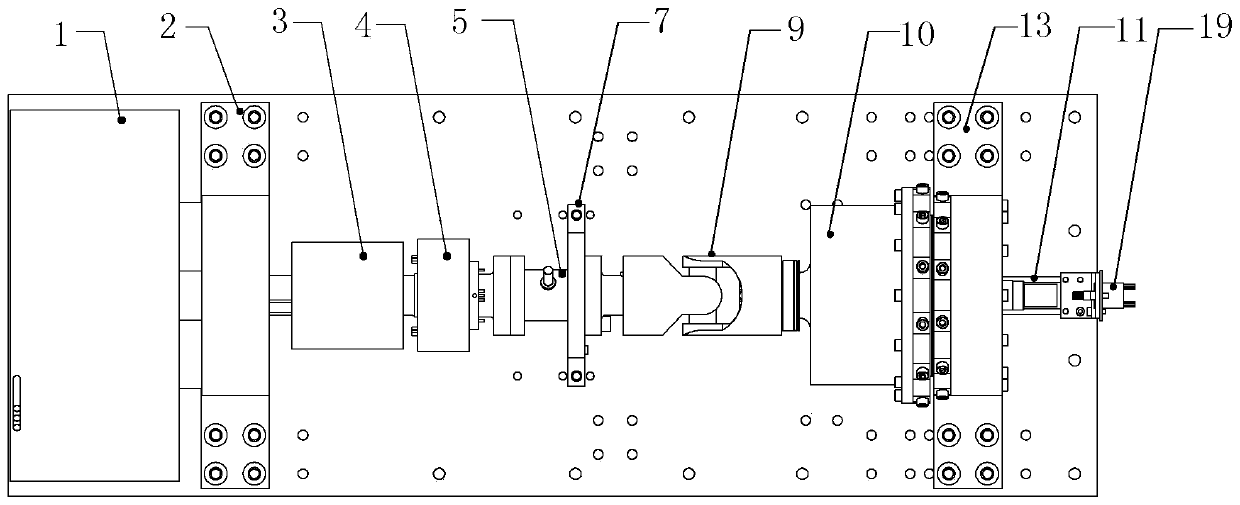
[0035] Specific implementation mode one: see Figure 1 to Figure 4 Describe this embodiment, the self-calibration platform for the modular joint torque sensor described in this embodiment, the self-calibration platform is used to calibrate the to-be-calibrated torque sensor 15-1 in the joint 15 under test, the self-calibration platform includes the brake 1, Brake seat 2, main coupling 3, first hollow slip ring 4, hollow slip ring connecting shaft 5, torque calibration sensor 6, torque calibration sensor seat 7, torque calibration sensor connecting shaft 8, secondary coupling 9 , Cylindrical closed box 10, transmission shaft 11 and base 12;
[0036] The hollow slip ring connecting shaft 5, the torque calibration sensor connecting shaft 8 and the transmission shaft 11 are all hollow shafts; the data transmission line of the torque sensor 15-1 to be calibrated is drawn from the hollow shaft;
[0037] The brake 1, the main coupling 3, the torque calibration sensor 6, the auxiliar...
specific Embodiment approach 2
[0048] Specific implementation mode two: see Figure 1 to Figure 4 Describe this embodiment. The difference between this embodiment and the autonomous calibration platform for modular joint torque sensors described in the first embodiment is that it also includes a pulley 16;
[0049] The pulley 16 is fixed on one end of the drive shaft 11 through a thin-walled deep groove ball bearing 17;
[0050] A wire rope 18 is wound on the pulley 16, and the wire rope 18 is used for loading objects.
[0051] In this embodiment, the present invention can test the influence of eccentric load on the precision of the modularized joint torque sensor. When testing the influence of the partial load, it is only necessary to hang loads of different masses on the wire rope 18, and the partial load can all be applied to the modular joints 15 to be tested, which is convenient for testing.
specific Embodiment approach 3
[0052] Specific implementation mode three: see Figure 1 to Figure 4 This embodiment is described. The difference between this embodiment and the autonomous calibration platform for modular joint torque sensors described in Embodiment 1 or Embodiment 2 is that the secondary coupling 9 is a diaphragm coupling or a universal coupling.
[0053] In this embodiment, the auxiliary coupling 9 is a diaphragm coupling or a universal coupling so that when the autonomous calibration platform is performing the influence of the partial load on the accuracy of the modularized joint torque sensor, the partial load is all applied to the torque sensor 15 to be calibrated -1, so that the calibration accuracy of the torque sensor 15-1 to be calibrated is high.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More