

Laser data recognition method and device, robot and storage medium
A data recognition and laser technology, applied in the field of robotics, can solve the problems of sparse laser data and too little information in robots, and achieve the effect of enhancing understanding ability and enriching information content
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0036] figure 1 It is a flow chart of a laser data recognition method provided by Embodiment 1 of the present invention. The laser data recognition method provided in this embodiment can be executed by a laser data recognition device, which can be realized by means of software and / or hardware and integrated into a robot. Among them, a robot refers to a machine device that can perform work automatically. It can not only accept human command, but also run pre-programmed programs, and can also act according to principles and programs formulated with artificial intelligence technology, such as moving cars.
[0037] Specifically, refer to figure 1 , the laser data recognition method provided in this embodiment specifically includes:
[0038] S110. Acquire laser data collected by the laser device and image data collected by the camera device.
[0039] In this embodiment, the robot is equipped with a laser device and an imaging device. Wherein, the laser device may be a 2D lidar...
Embodiment 2
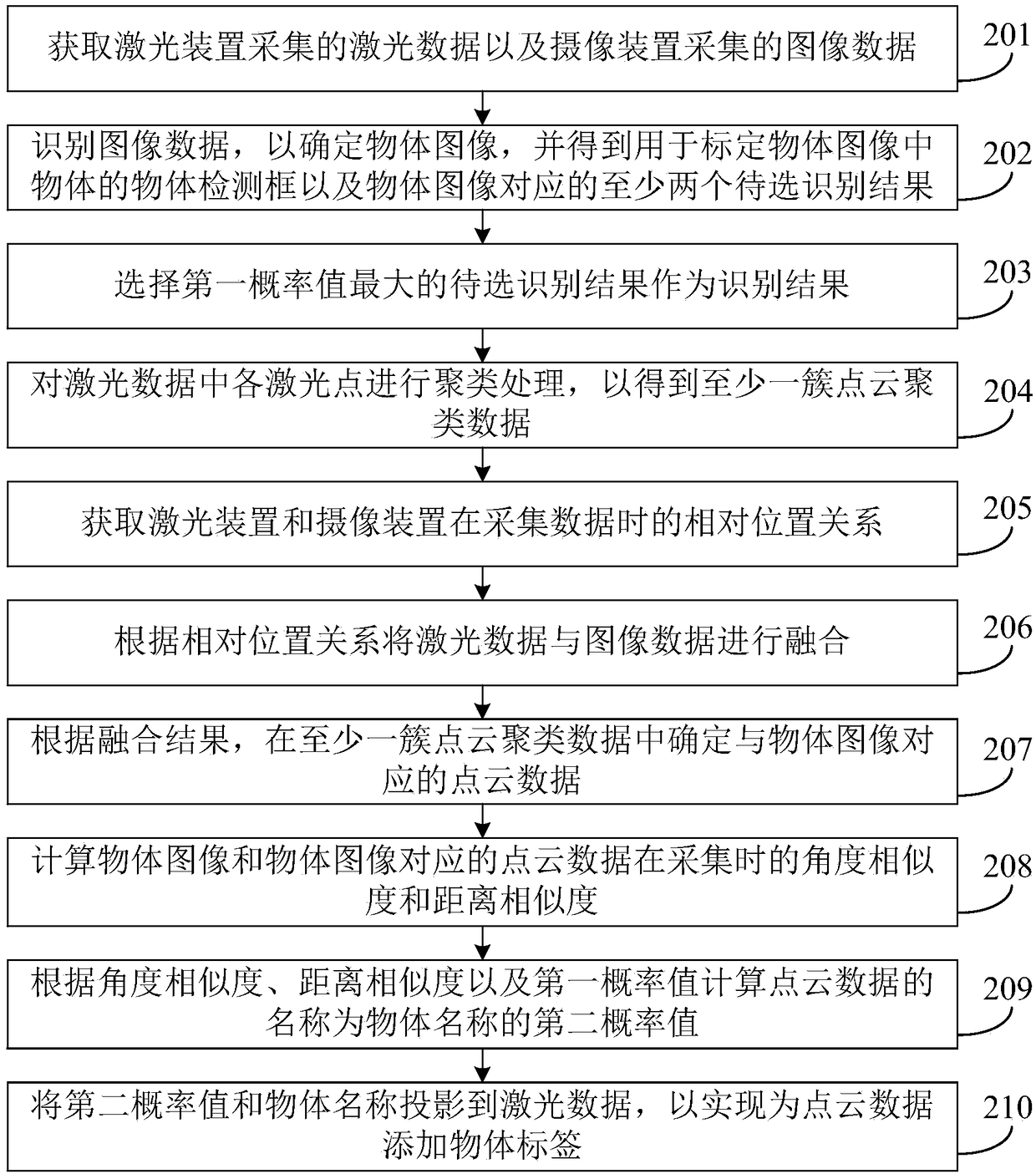
[0055] figure 2 It is a flow chart of a laser data recognition method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In an embodiment, the recognition result includes: an object name of the object in the object image and a first probability value representing the accuracy of the object name.
[0056] Specifically, refer to figure 2 , the laser data recognition method provided in this embodiment specifically includes:
[0057] S201. Obtain laser data collected by a laser device and image data collected by a camera device.
[0058] S202. Recognize the image data to determine the object image, and obtain an object detection frame used to calibrate the object in the object image and at least two candidate recognition results corresponding to the object image.
[0059] Specifically, the target detection algorithm of the YOLO V2 version is used for image recognition to obtain the object detection ...
Embodiment 3
[0115] Figure 14 It is a schematic structural diagram of a laser data recognition device provided by Embodiment 3 of the present invention. refer to Figure 14 , the laser data recognition device provided in this embodiment specifically includes: a data acquisition module 301 , an image recognition module 302 and a label addition module 303 .
[0116] Wherein, the data acquisition module 301 is used to obtain the laser data collected by the laser device and the image data collected by the camera device; the image recognition module 302 is used to determine the recognition result of the object image in the image data; The result adds object labels to the point cloud data corresponding to the object image in the laser data.
[0117] The technical solution provided in this embodiment solves the problem of laser The laser data collected by the device is too sparse, which makes the robot get too little information. By adding a camera device, the robot's ability to understand th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More