Rose flower picking device
A technology of roses and servo motors, which can be applied to picking machines, agricultural machinery and tools, and other applications. It can solve problems such as inability to pick roses, inability to pick roses efficiently, and scratches on workers' arms, achieving light weight and small size. , the effect of reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
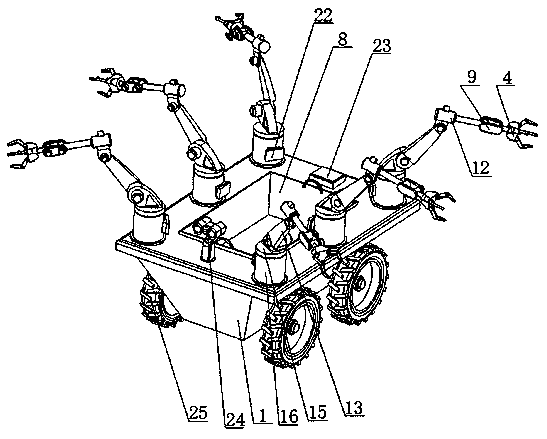
[0033] Embodiment 1: as Figure 1~12 As shown, the rose picking device includes vehicle frame 1, 6 picking parts and walking parts;
[0034] The 6 picking parts are installed on both sides of the upper part of the vehicle frame 1 respectively, and each side is provided with 3 picking parts, and the walking parts are located under the vehicle frame 1 .
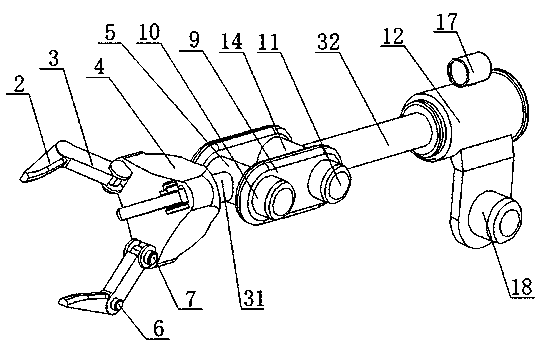
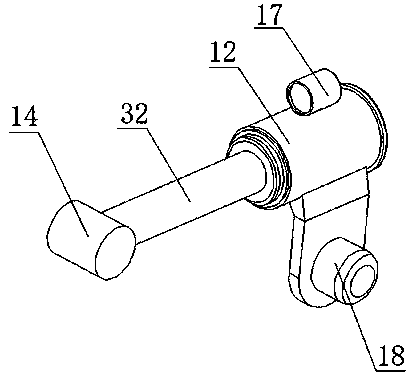
[0035] The picking components include picking hands, hinge shaft I5, servo motor I6, servo motor II7, rose storage box 8, connecting arm 9, servo motor III10, servo motor IV11, execution arm I12, execution arm II13, hinge shaft II14, Turntable 15, column 16, rose recognition probe 17, servo motor Ⅴ18, servo motor Ⅴ spindle 19, servo motor Ⅵ20, servo motor Ⅵ spindle 21, picking controller 22, axis Ⅰ29, axis Ⅱ30, axis Ⅲ31, axis Ⅳ32, turntable 33;
[0036]The top of the vehicle frame 1 is provided with a groove, and a rose storage box 8 is placed in the groove. The picking hand includes a picking palm 4 and three clamping finger...
Embodiment 2
[0042] Embodiment 2: The structure of this embodiment is the same as that of Embodiment 1. The difference is that there are 8 picking parts, which are respectively installed on both sides of the upper part of the vehicle frame 1, and each side is provided with 4 picking parts.
[0043] The working principle of the present embodiment device is as follows:
[0044] When the device works, the self-propelled identification probe 24 on the walking parts, that is, the binocular camera, collects road information and feeds it back to the walking controller 23, and the walking controller 23 controls the rotation of the driving motor 28 through a pulse signal, thereby controlling the progress of the whole machine. The rose recognition probe 17 collects image information of roses, and feeds back to the picking controller 22, and the picking controller 22 controls the servo motor of the picking hand to work according to the feedback information, thereby driving the picking hand to reach th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com