A spherical robot for pipeline inspection
A spherical robot and pipeline detection technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of large contact area, impact on safety, and many contact points of pipelines, and achieve small contact cross-sectional area and anti-overturning ability Strong, sporty cornering and nimble effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
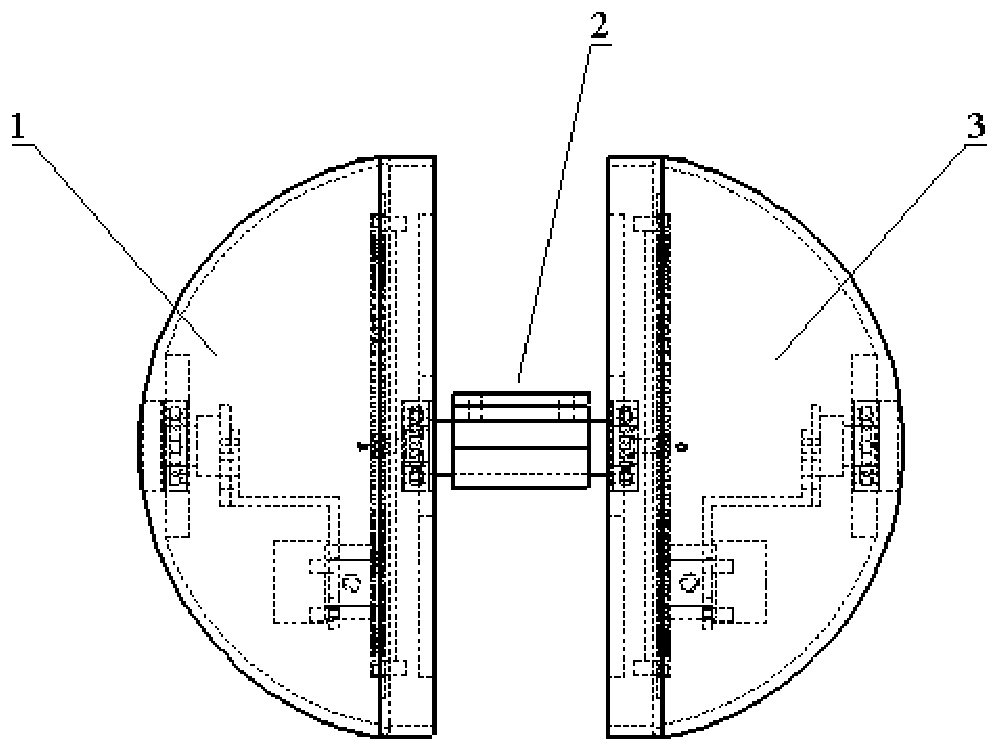
[0045] Embodiment 1: as Figure 1~6 As shown, the spherical robot used for pipeline detection in the present invention includes a left hemisphere 1, an intermediate connector 2, a right hemisphere 3 and control components; the left hemisphere 1 is connected with the right hemisphere 3 through the intermediate connector 2, and the left hemisphere 1 has the same structure as the right hemisphere 3, and the left hemisphere 1 and the right hemisphere 3 are symmetrical about the middle connecting piece 2, and the middle connecting piece 2 is provided with control components.
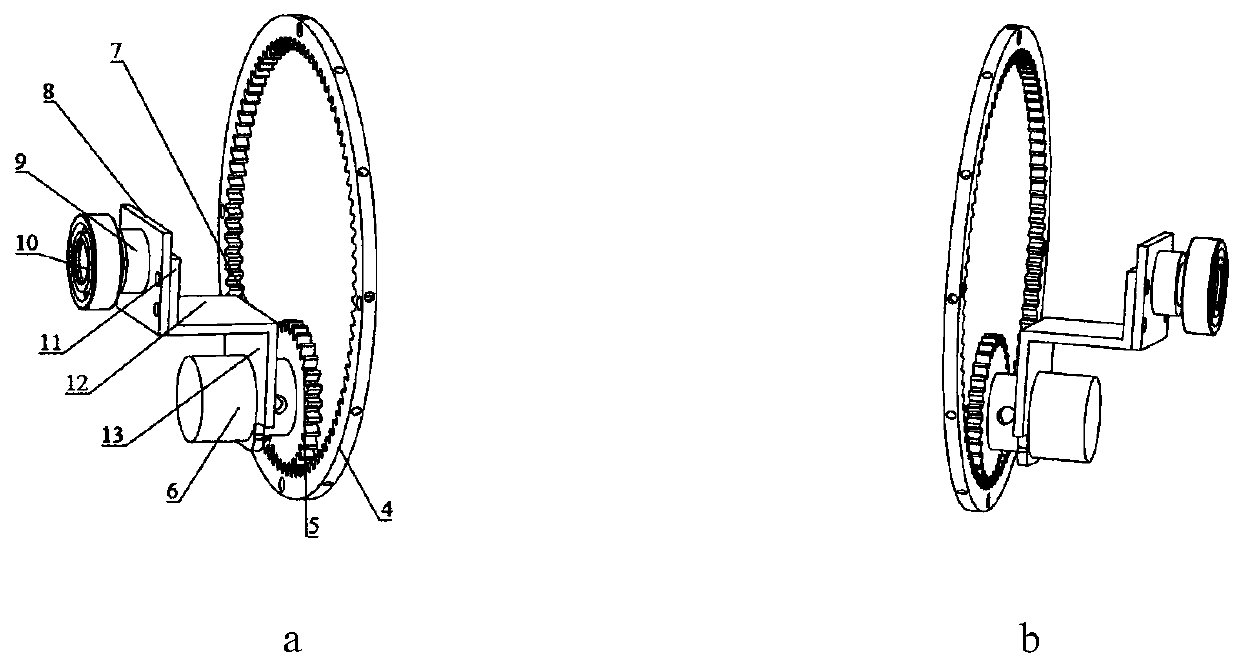
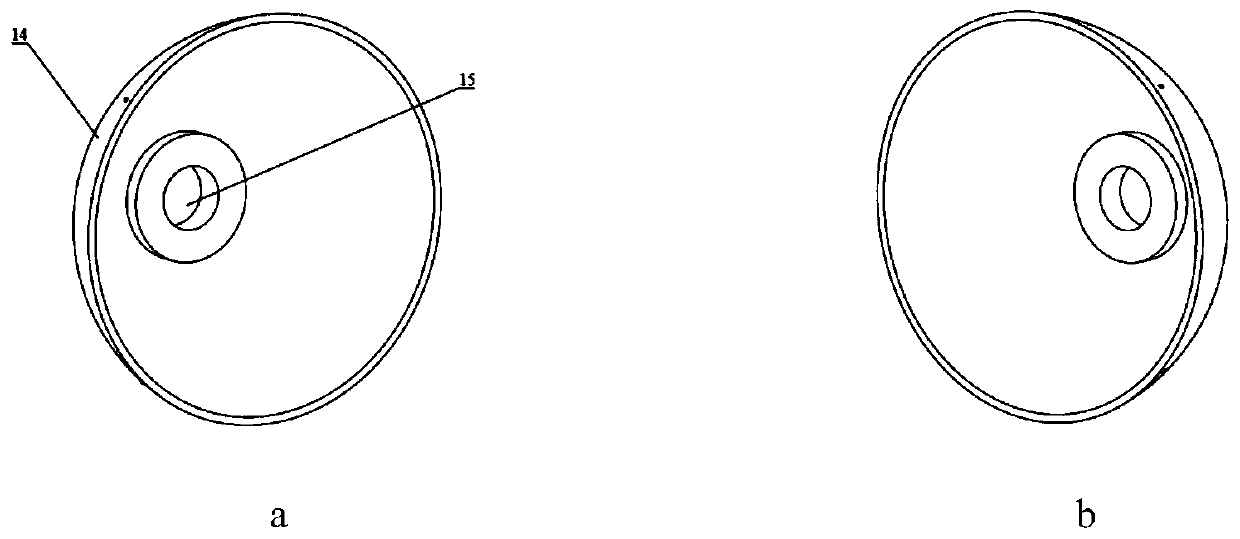
[0046] The left hemisphere 1 comprises a left rack and pinion transmission part, a left connecting bracket 7, a spacer 8, an axle 9, a ball bearing 10, a left hemispherical shell 14, a left hemispherical shell closing plate 16; the left hemispherical shell 14 is provided with Left rack and pinion transmission part, left connecting bracket 7, gasket 8, shaft 9, ball bearing 10, described left rack and pinion t...
Embodiment 2
[0049] Embodiment 2: The structure of this embodiment is the same as that of Embodiment 1, except that the gear 5 is a linear gear with one side opening, and the shaft 9 is a stepped shaft. The sensor of the sensor module is a visual sensor.
[0050] The movement process of the double rack and pinion hemisphere differential spherical robot in this embodiment is as follows: the DC servo motor 6 drives the linear gear 5 to rotate, and the linear gear 5 and the inner ring gear 4 mesh with each other, so that the left hemisphere moves, and the linear gear of the right hemisphere is similar Mesh with the inner ring gear, so that the right hemisphere moves, when the rotation speed and direction of the DC servo motor 6 and the DC servo motor of the right hemisphere are the same, the robot makes a linear motion; when the DC servo motor 6 and the DC servo motor of the right hemisphere move When the rotation speed is the same and the direction is opposite, the robot will turn in situ; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com