

Multi-agent system real-time partition stable control method of controlled quantity discretization
A technology of multi-agent system and stable control method, which is applied in general control system, control/regulation system, adaptive control, etc., and can solve the complex and difficult design of control law, discontinuous control amount, and the inability of agents to achieve continuous control And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
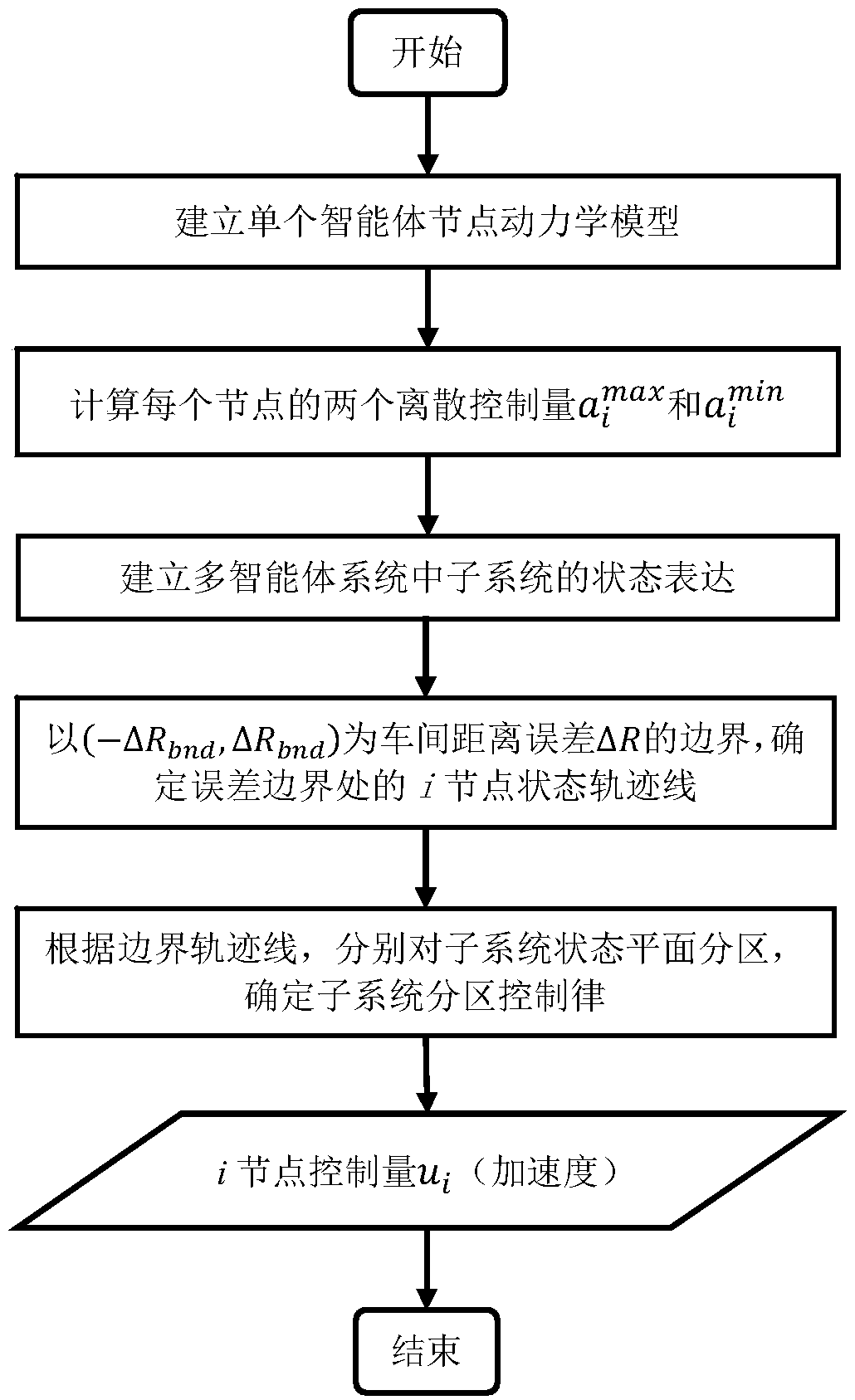
[0065] The multi-agent system partition stability control method with discrete control quantity proposed by the present invention, its flow chart is as follows figure 1 shown, including the following steps:
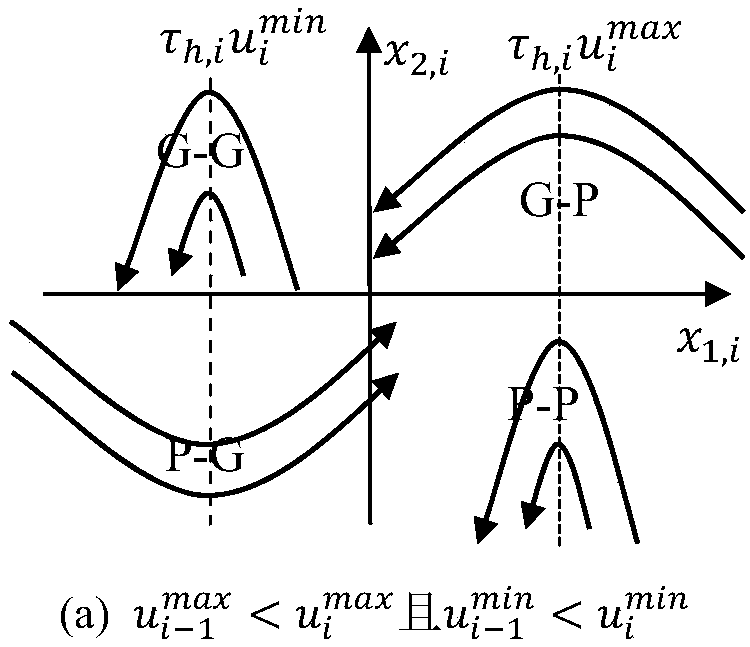
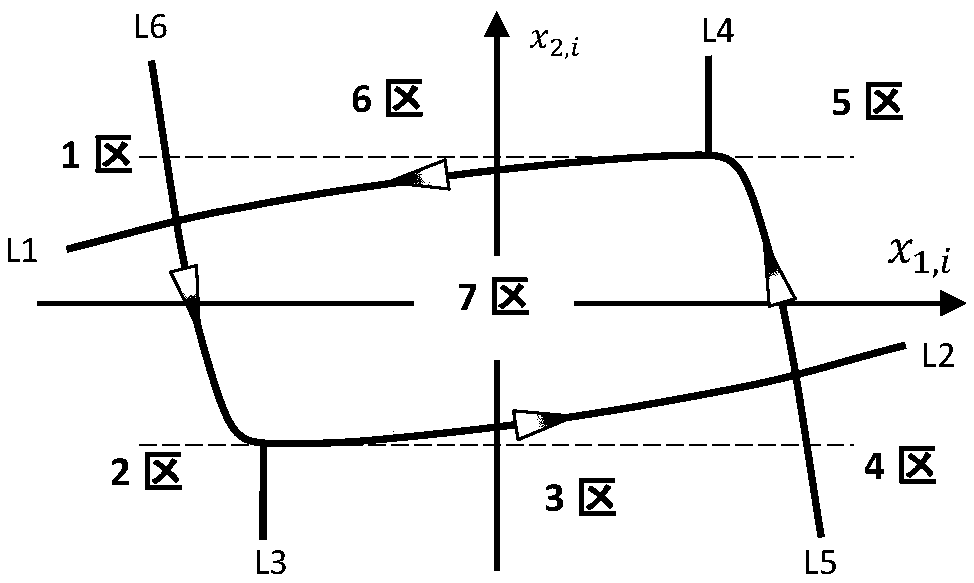
[0066] This method includes decomposing the entire multi-agent system into multiple subsystems, establishing a state model of the subsystem, analyzing the state trajectory of the subsystem in the state space based on the state model, obtaining the partition diagram of the state plane of the subsystem, and determining each sub-system in the partition diagram. The control quantity of the nodes in the interval is obtained to obtain the switching logic of the control quantity; in this way, the distributed partition stability control of the multi-agent system with discrete control quantity is realized.
[0067] (1) Calculate the control amount of a single agent, that is, a node in a multi-agent system:
[0068] Each agent in the multi-agent system is recorded as a node, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More