

Method, system and device for local feature description of rotation-invariant multi-source images
A local feature, rotation invariant technology, applied in the field of image processing, can solve the problems of large noise influence, noise sensitivity, no rotation invariance, etc., to achieve strong robustness, noise suppression effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
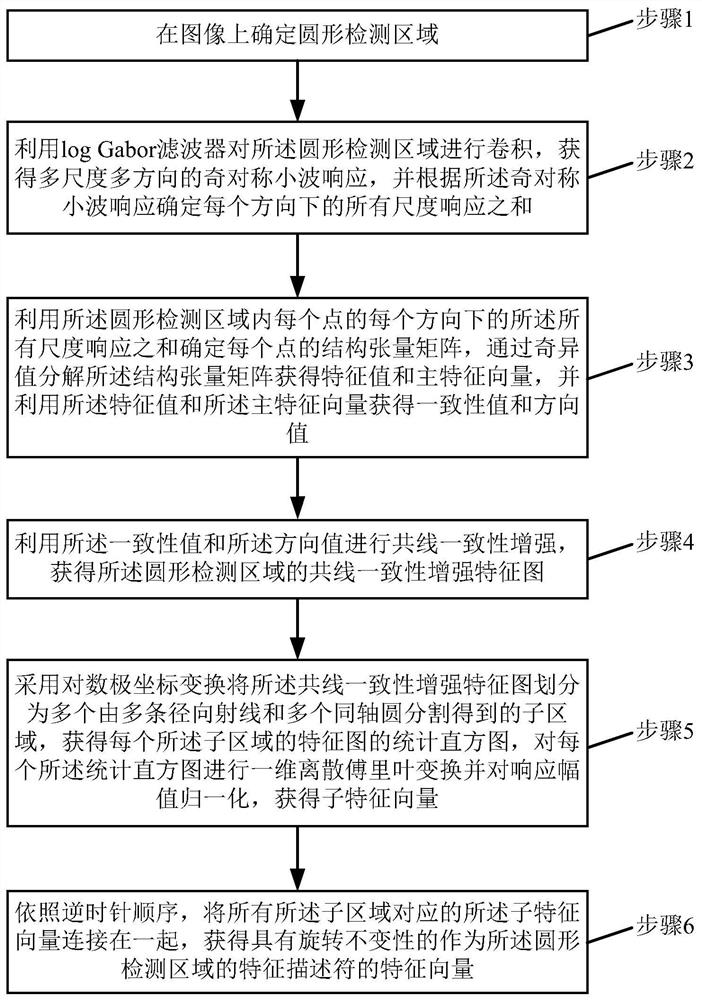
[0035] Such as figure 1 As shown, a method for describing local features of a rotation-invariant multi-source image in an embodiment of the present invention includes:
[0036] Step 1, determine the circular detection area on the image.
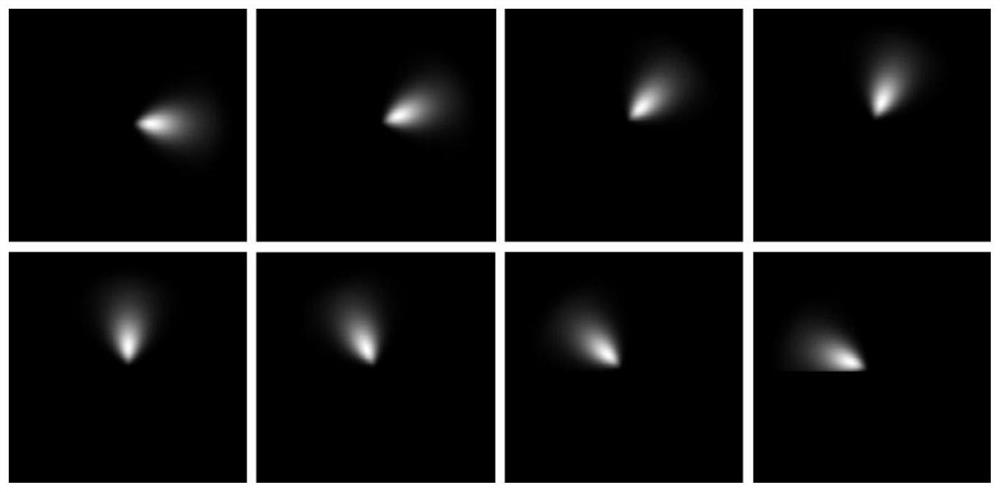
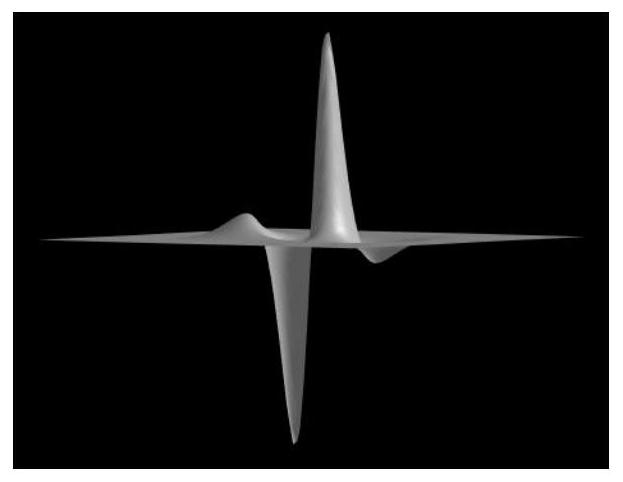
[0037] Step 2, using multi-scale and multi-directional log Gabor filters to convolve the circular detection area to obtain multi-scale and multi-directional odd symmetric wavelet responses, and determine all sum of scale responses.
[0038] Step 3, using the sum of all scale responses in each direction of each point in the circular detection area to determine the structure tensor matrix of each point, and obtain the eigenvalues by singular value decomposition of the structure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More