

Robot embedded computing terminal integrated with high precision navigation positioning and deep learning
A technology of navigation positioning and deep learning, applied in vehicle position/route/altitude control, instruments, two-dimensional position/course control, etc., can solve the lack of deep learning platform support, lack of environmental intelligent perception ability, and low degree of hardware integration and other problems, to achieve the effect of rich interfaces, overcoming inaccurate monocular ranging, and high integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
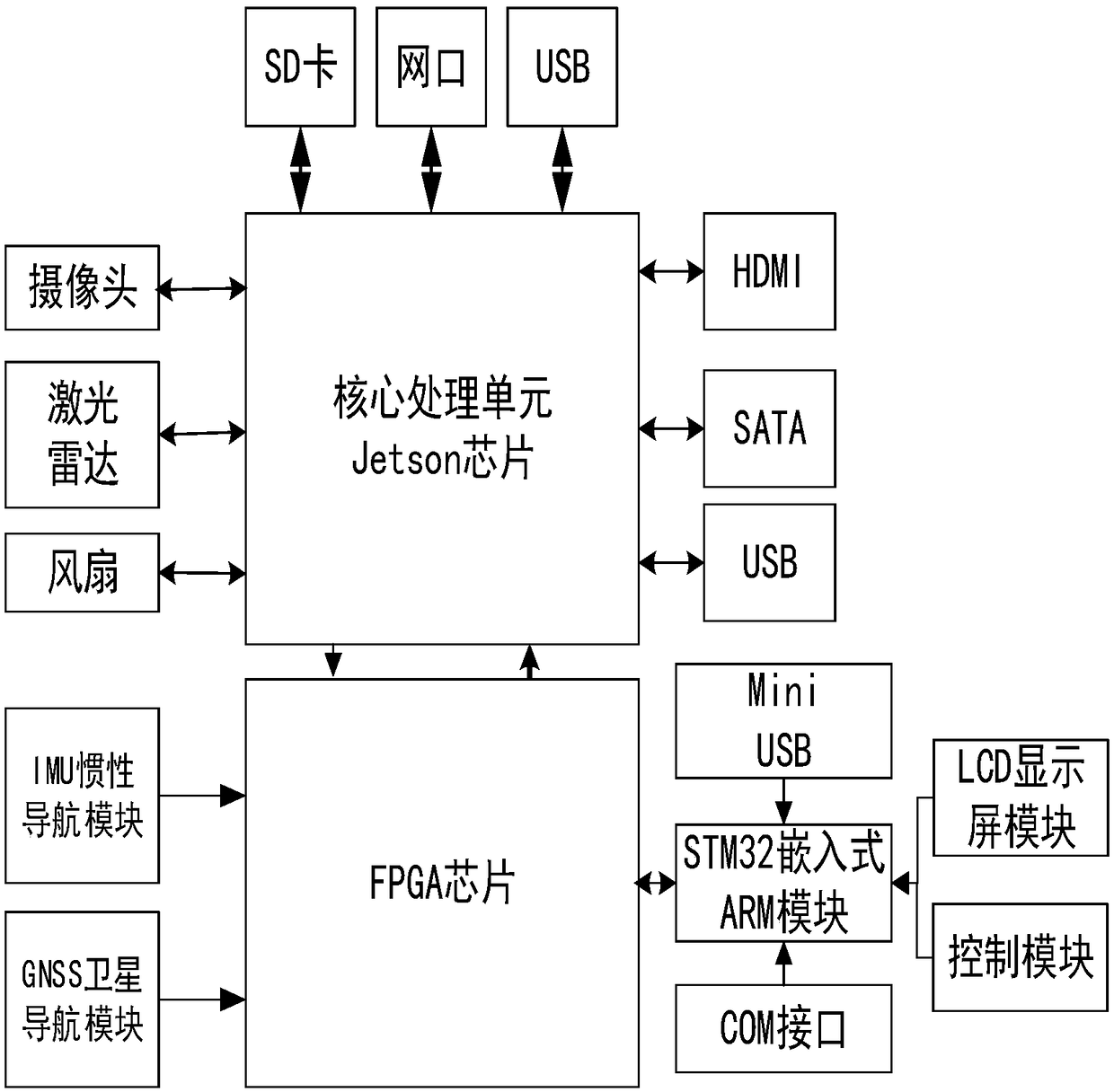
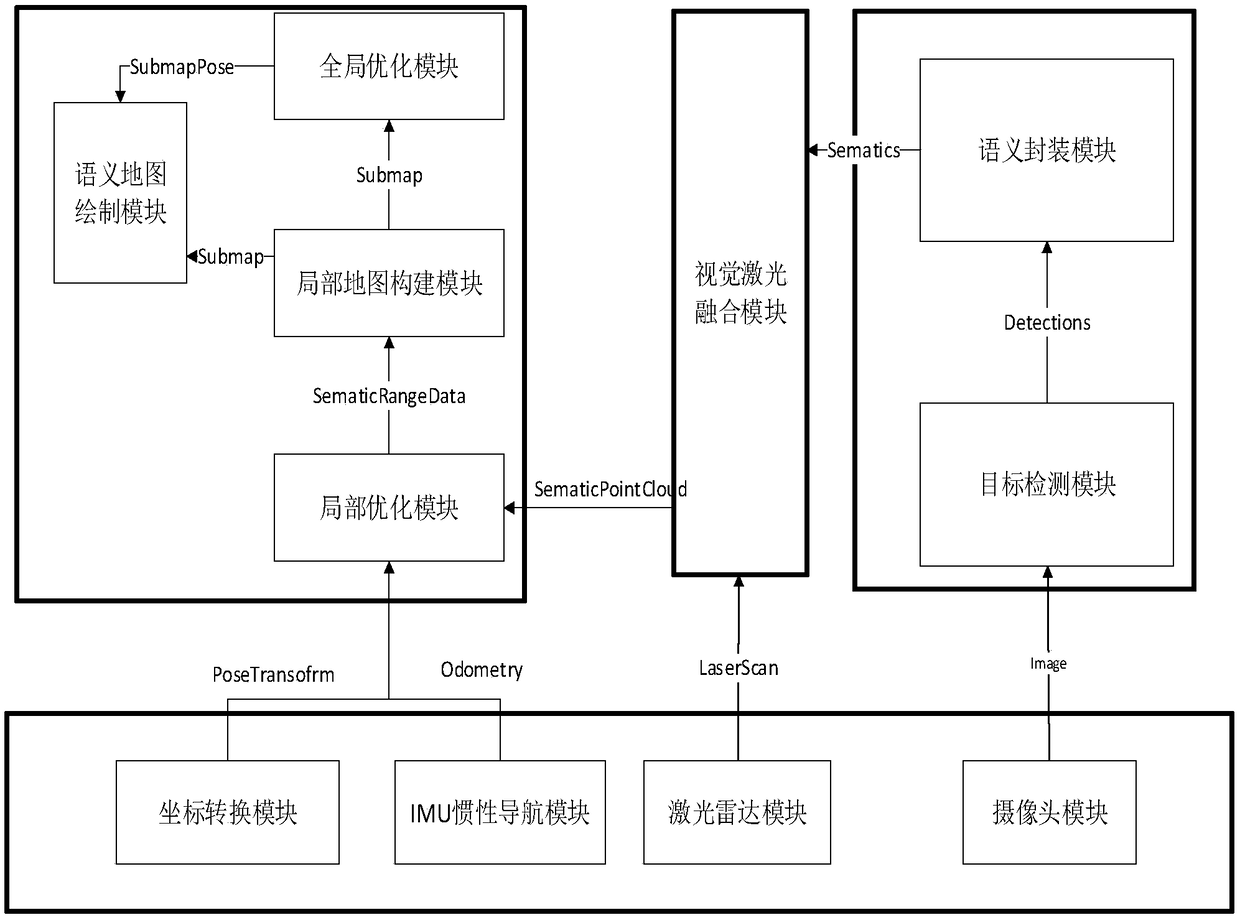
[0023] The present invention designs a high-precision integrated intelligent robot embedded device, which provides various interfaces for accessing various sensor devices, and realizes the access of multi-source sensor data. The whole setup satisfies the acquisition, processing and output of multiple signals, and has continuous high-precision multi-sensor fusion adaptive positioning and deep learning capabilities.
[0024] A highly integrated embedded robot development device based on Beidou positioning provided by the embodiment of the present invention has ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More