

Mode-switching-based symmetrical prediction control method of bilateral teleoperation of robot
A predictive control, robotics technology, applied in adaptive control, general control system, control/regulation system, etc., can solve modeling uncertainty, gravity term uncertainty and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0056] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
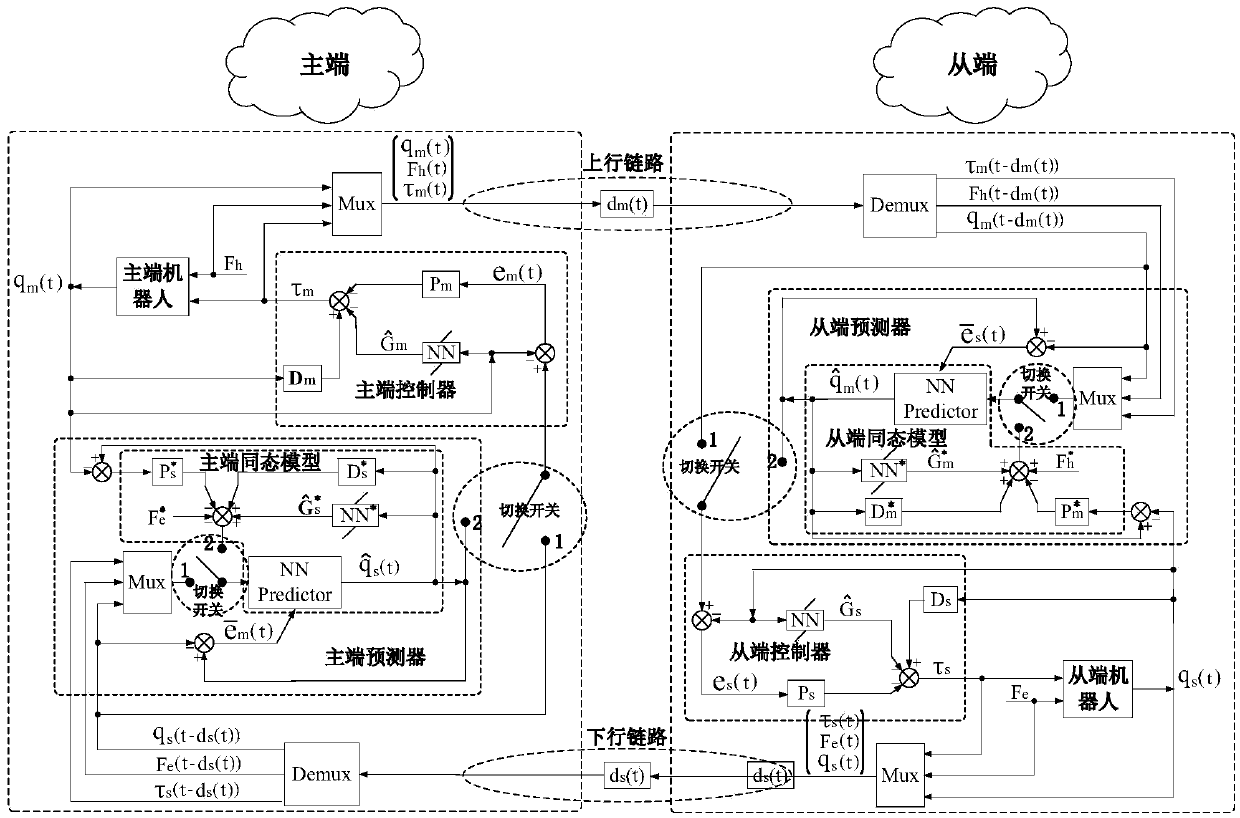
[0057] figure 1 A frame diagram of a robot bilateral teleoperation system based on a symmetric predictive control method based on mode switching to achieve stable, real-time, continuous, and precise control is given. The corresponding implementation steps are as follows:
[0058] Step 1: Give the dynamic models of the master and slave robots, and estimate the uncertainty;
[0059] Step 2: Build master and slave predictors to realize symmetric predictive control;
[0060] Step 3: Design the master and slave controllers respectively corresponding to the "motion-waiting mode" and "predictor mode", and formulate a mechanism based on mode switching. Finally, the above work is combined to form a symmetric predictive control method based on mode switching.
[0061] step 1:
[0062] The main work of this step is to give the master and slave dynamic models in the bila...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More