

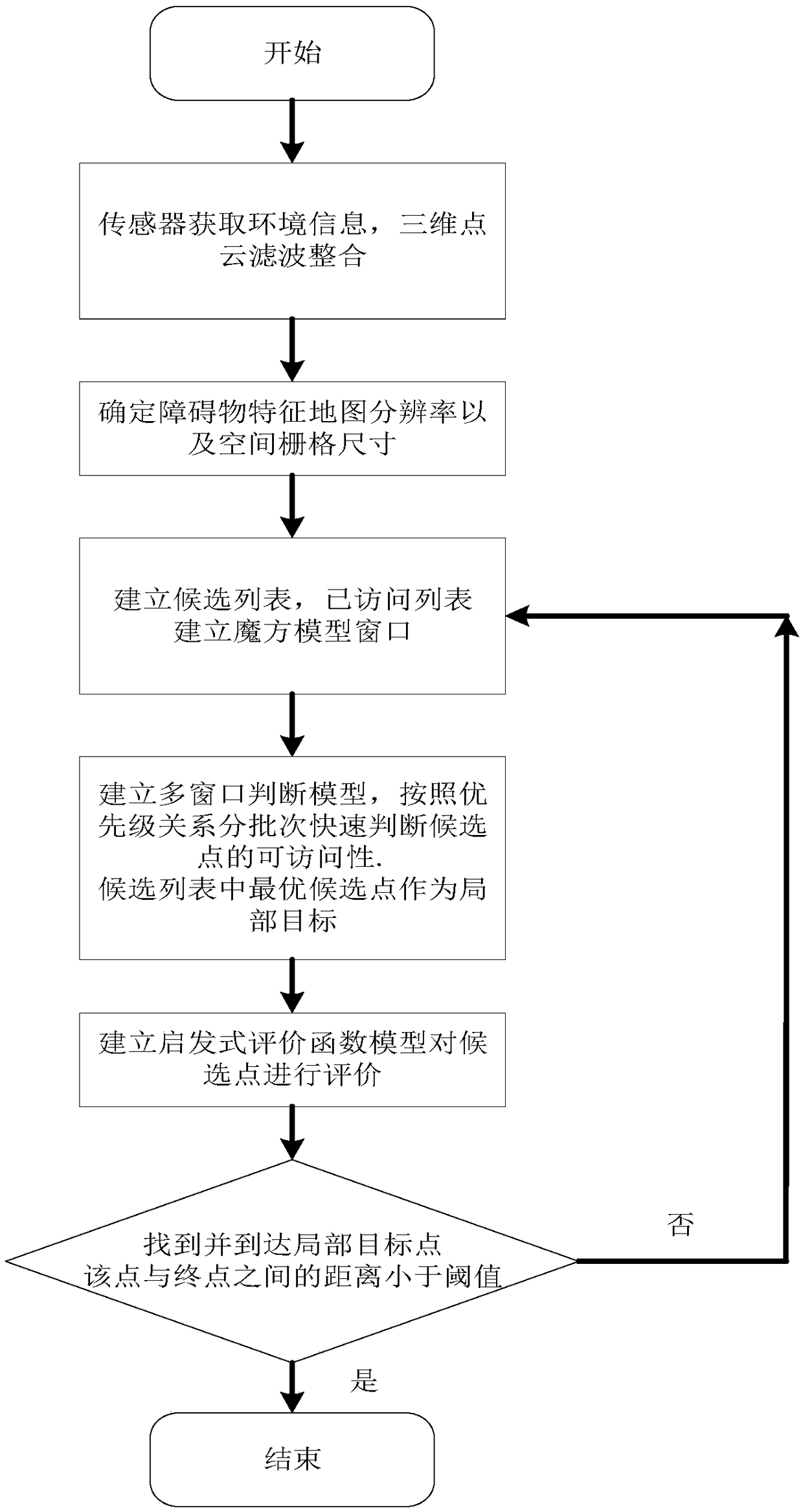
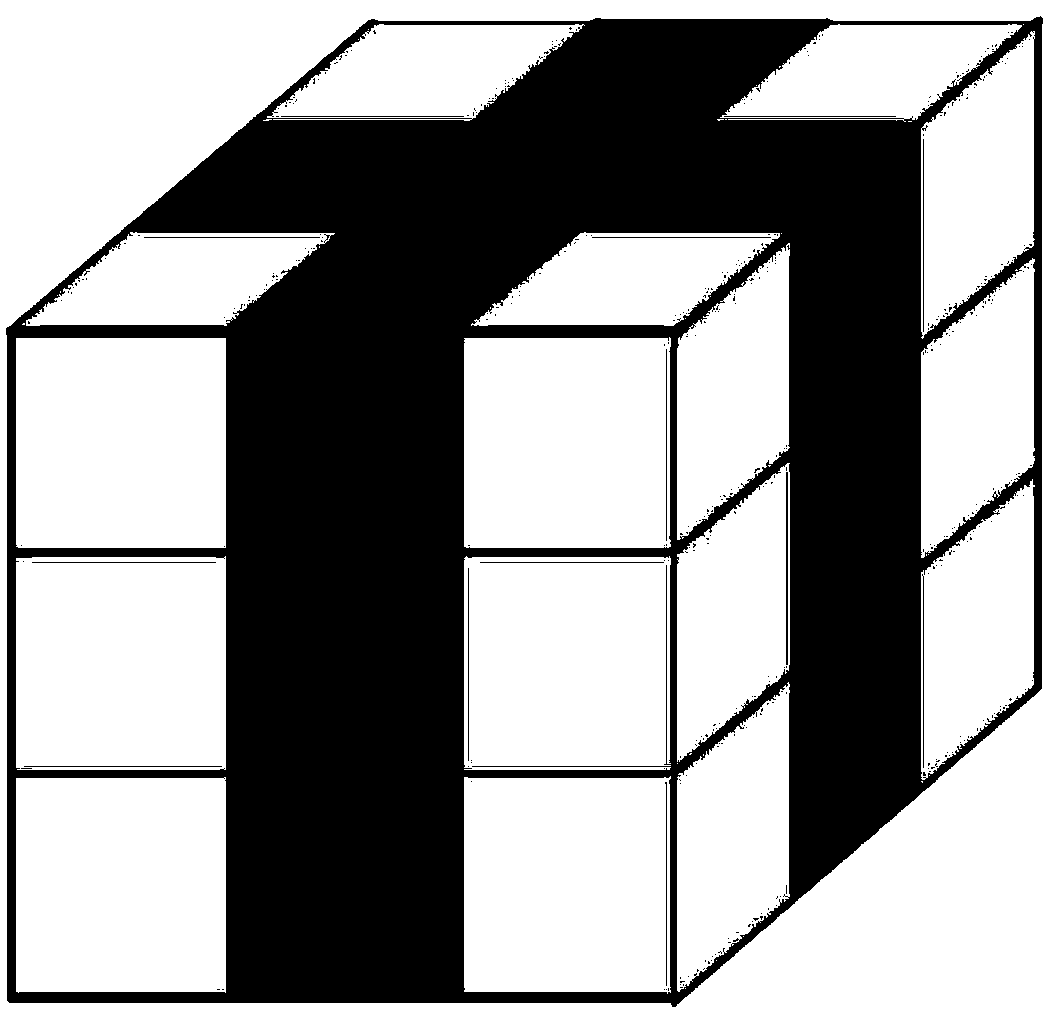
Multiwindow-heuristic three-dimensional space path planning method based on magic cube model
A path planning and three-dimensional space technology, applied in three-dimensional position/channel control, etc., can solve the problems of unmanned aerial vehicles/unmanned submersibles, low algorithm efficiency, and low practicability, etc., to improve algorithm efficiency , the result is flexible, and the effect of taking into account the efficiency of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0068] In the following, the method of the present invention is used to carry out path planning for the actual three-dimensional space scene, and the local path planning method with better real-time performance is compared at the same time, and the results are as follows:
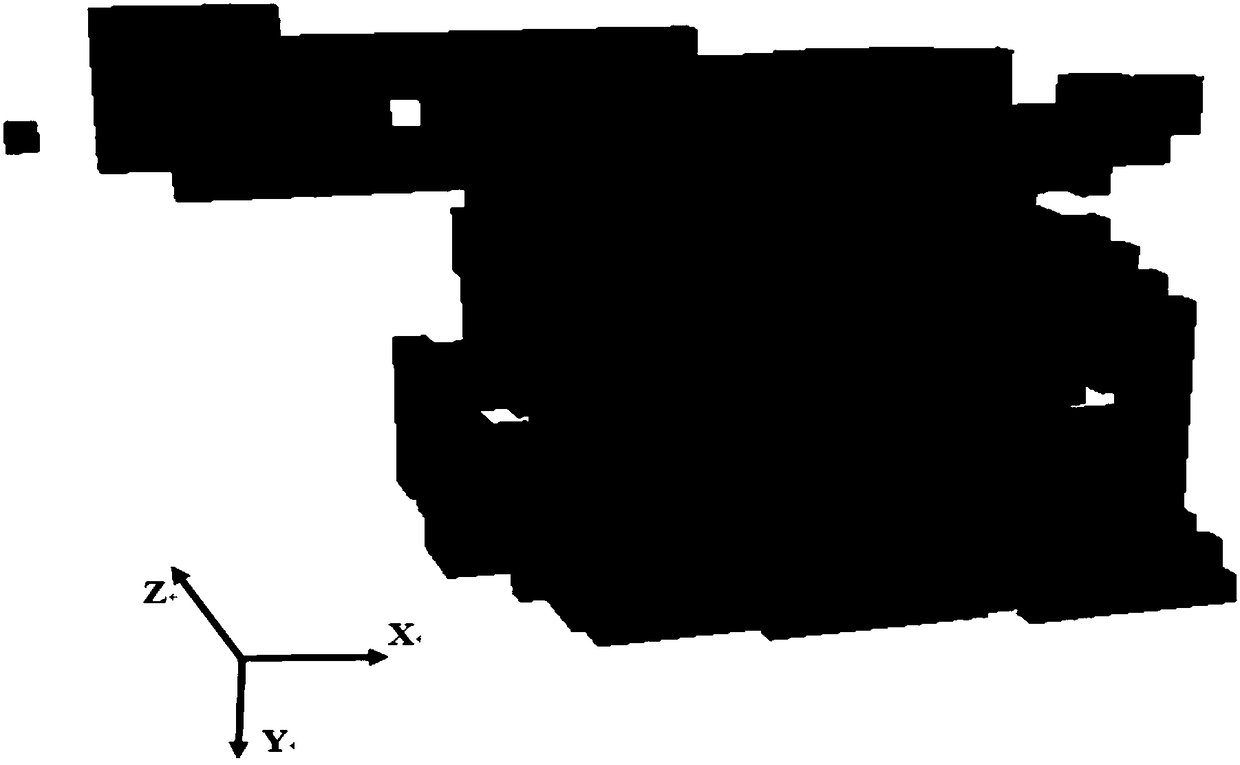
[0069] image 3 As the test scene model of this example, the model depicts a desk model with a computer in the office. Among them, the x coordinate points to the right, the y coordinate points down, and the z coordinate points to the table model.
[0070] In the 3D scene, set the start point to (0,0,-1) and the end point to (1.5,-0.6,4). The detailed path analysis results are shown in Table 1, and the planning results are as follows Figure 4 shown.
[0071] Among them, the planning time refers to the overall time consumption of path planning, the number of intermediate nodes is the number of path nodes included in the final path result, and the path length refers to the total length of the final path in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More