

Vision measurement system for non-cooperative target relative navigation simulation verification, and method thereof
A non-cooperative target and relative navigation technology, which is applied in the field of visual measurement system for non-cooperative target relative navigation simulation verification, can solve the problems that the research on short-distance relative navigation and measurement technology has not been in-depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
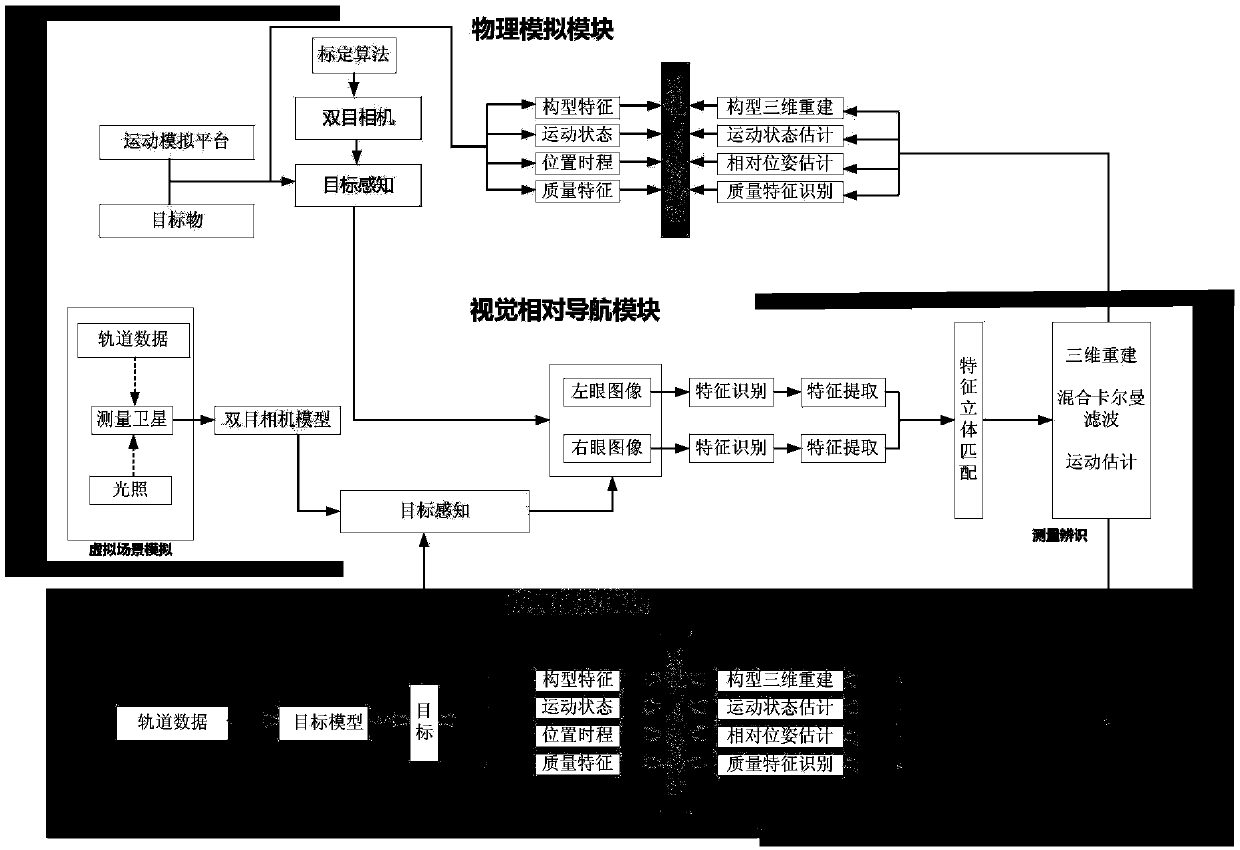
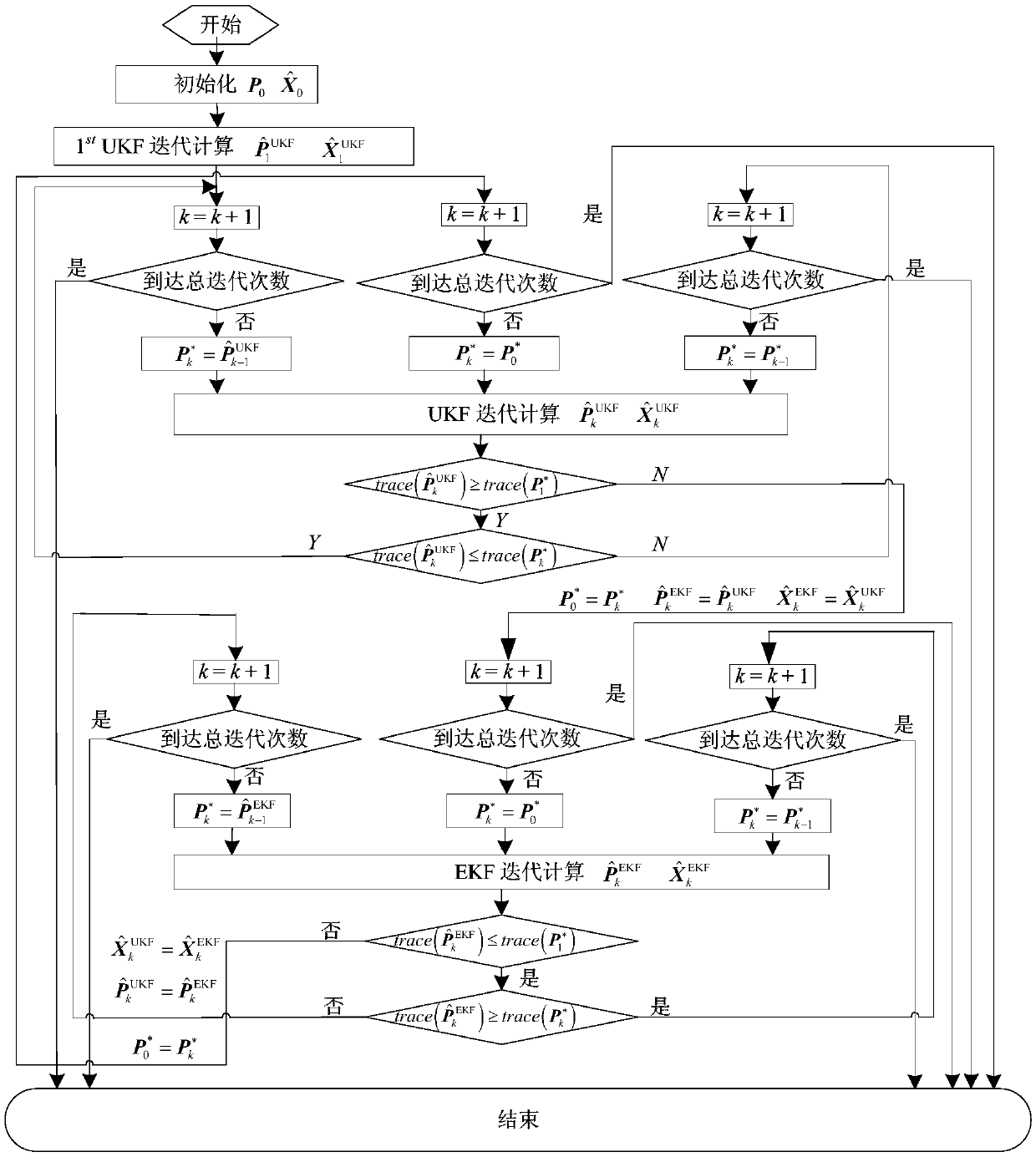
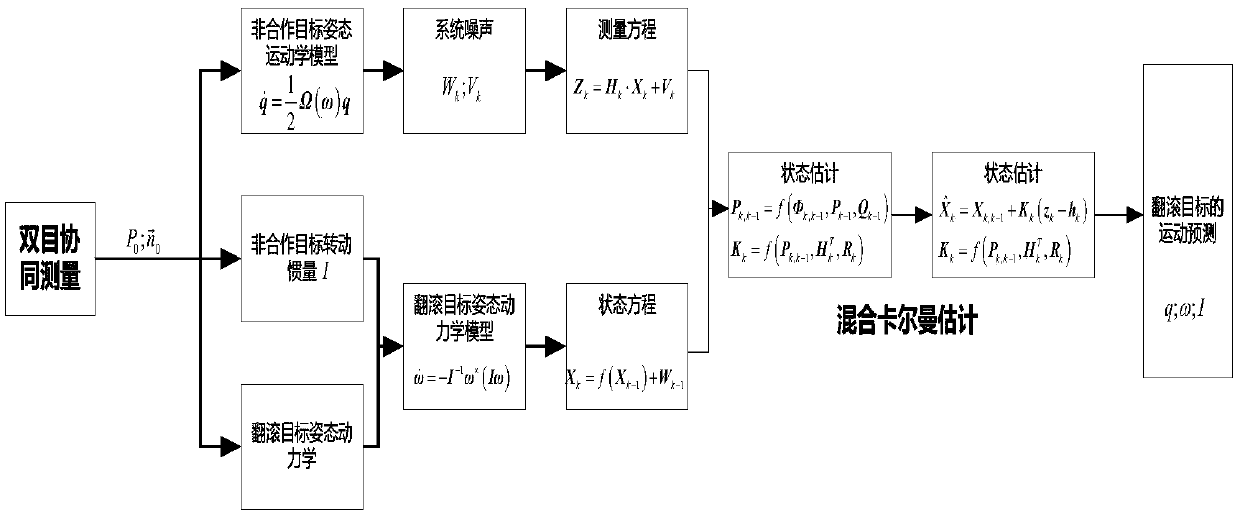
[0056] The present invention combines the urgent engineering needs of short-distance relative navigation of non-cooperative targets in my country's aerospace engineering, and establishes a ground simulation verification system framework for binocular vision measurement systems for non-cooperative target short-distance relative navigation. In order to improve the efficiency and accuracy of identification, a hybrid extended Kalman filter / unscented Kalman filter method for predicting the motion state of non-cooperative targets is proposed. At the same time, considering the arbitrariness of the motion state of non-cooperative targets, a non-cooperative target rotating around an arbitrary axis is established. The state equation and observation equation of the cooperative target are used for parameter identification, and the invention can lay the foundation for the subsequent algorithm verification and system ground test of non-cooperative target short-range navigation.
[0057] The te...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More