

Real-time vehicle backing trajectory display system and equal-width trajectory line drawing method
A display system and track line technology, applied in the direction of image data processing, instrumentation, 2D image generation, etc., can solve the problem of not being able to help the driver observe the actual situation of the blind area behind the car, so as to solve the jump of track line and ensure the simulation The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
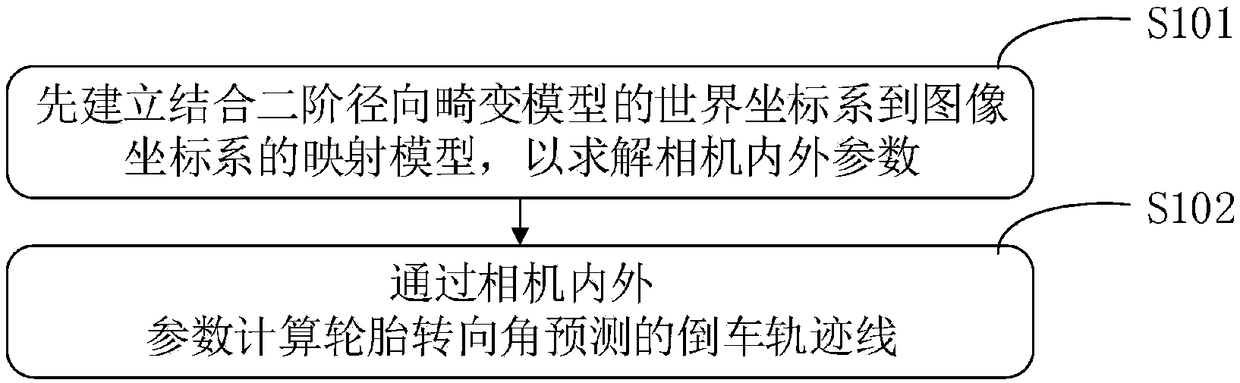
[0059] figure 1 It is a method flowchart of the real-time reversing trajectory display method of the present invention.
[0060] Such as figure 1 As shown, the present embodiment provides a real-time reversing trajectory display method, including:
[0061] Step S101, first establish a mapping model from the world coordinate system to the image coordinate system combined with the second-order radial distortion model, so as to solve the internal and external parameters of the camera; and
[0062] In step S102, calculate the reverse trajectory predicted by the tire steering angle through the internal and external parameters of the camera.
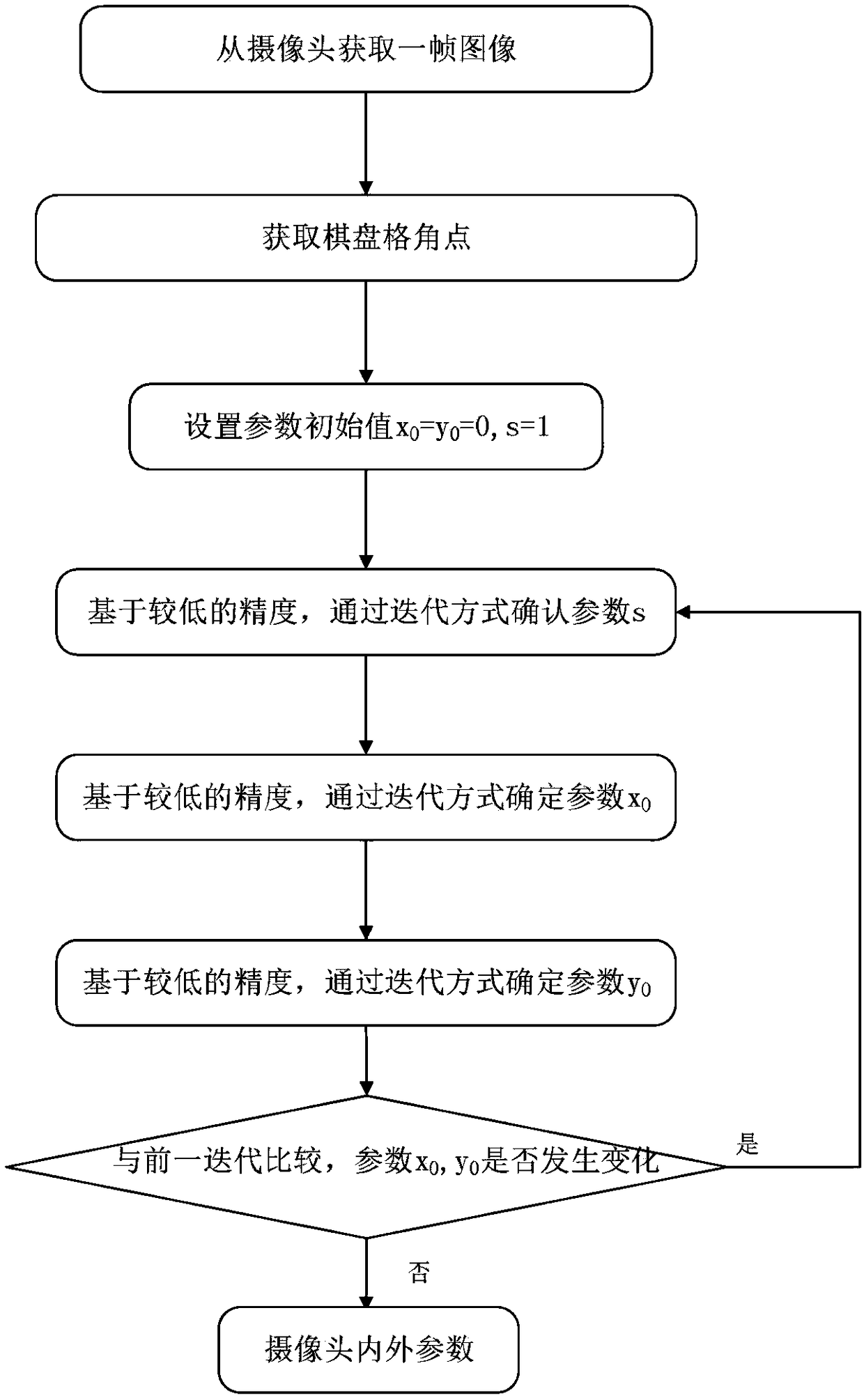
[0063] figure 2 It is a flow chart of the method for solving the internal and external parameters of the camera in the present invention.
[0064] The specific steps to obtain the internal and external parameters of the camera are as follows:
[0065] Use the camera to capture a black and white checkerboard image, and use the black and w...
Embodiment 2
[0122] Figure 5 It is a functional block diagram of the real-time reversing imaging display system of the present invention.
[0123] Such as Figure 5 As shown, on the basis of Embodiment 1, this embodiment provides a real-time reversing imaging display system, including:
[0124] A processor module, a camera for shooting reversing images, and a screen controlled by the processor module; wherein
[0125] The processor module is adapted to calculate the reversing trajectory line according to the reversing image, and draw the reversing trajectory line on the screen in real time.
[0126] The processor module is suitable for calculating the reversing trajectory line, that is, the processor module is suitable for first establishing a mapping model from the world coordinate system to the image coordinate system combined with the second-order radial distortion model, so as to solve the internal and external parameters of the camera; and then through The internal and external pa...
Embodiment 3
[0131] Figure 6 It is a flow chart of the method for drawing equal-width trajectory lines of the present invention.
[0132] See Figure 6 , on the basis of Embodiment 1, this embodiment provides a method for drawing equal-width trajectory lines, including:
[0133] Step S201, calculating the slope of the tangent line at each point of the centerline of the near-wide and far-narrow locus; and
[0134] Step S202, draw the trajectory line of equal width after perspective transformation through slope transformation.
[0135] Figure 7 It is a schematic diagram of trajectory lines in the drawing method of equal width trajectory lines of the present invention;
[0136] The specific calculation method of tangent slope is as follows:
[0137] The equal-width trajectory line drawn in world coordinates will be mapped to a trajectory line with near width and far narrowness after perspective transformation. To draw a trajectory line of equal width on the screen, it is necessary to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More