

Arc welding robot welding seam tracking posture adjusting method
An adjustment method and robot technology, applied in arc welding equipment, welding equipment, manufacturing tools, etc., can solve the problems of lack of environmental adaptability and inability to guarantee welding quality, so as to improve continuity and stability and improve welding quality , to ensure continuous and stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
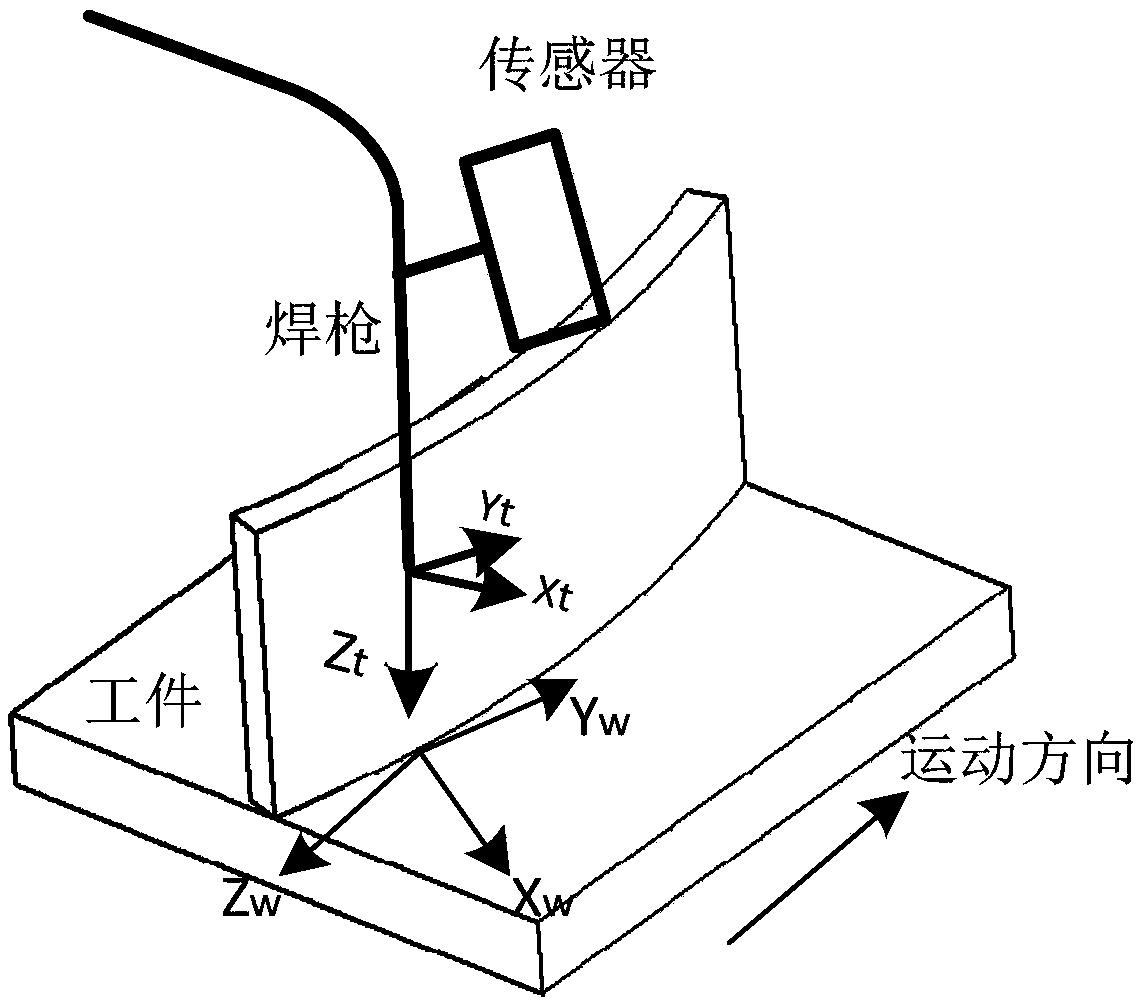
[0033] The present invention proposes an arc welding robot seam tracking posture adjustment method based on a structured light vision sensor, which is mainly aimed at the automatic adjustment and control of the posture when the non-linear seam is tracked, so as to ensure the continuous and stable posture of the welding torch when the robot is tracking the seam, and ensure Welding quality, while adding image field of view centering control, to ensure the continuity and stability of structured light vision sensor detection.
[0034] In order to make the present invention more clear, this embodiment will be described in detail by taking a fillet T-shaped weld as an example.
[0035] figure 1 Create a schematic diagram of the weld coordinate system for a fillet T-wel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More