

Ship gyro stabilization control method based on fuzzy immune controller at low speed
A technology of fuzzy immunity and control methods, applied in the direction of direct use of gyroscopes to reduce ship motion, adaptive control, general control systems, etc., can solve problems such as ship restrictions, ship capsizing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0048] (1) Establishment of random wave model
[0049] In the 3rd International Ship Structure Conference, the wave spectrum used uniformly is the ITTC dual-parameter wave spectrum, which can simulate waves that are not fully grown. The wave spectrum of the present invention also uses this wave spectrum.
[0050] From the 1950s to the present, many oceanographers and related engineers have been exploring the learning of ocean waves. Under random conditions, they have observed and analyzed enough samples of ordinary ocean waves to obtain the spectral density that characterizes ocean waves. This wave is a two-dimensional long crest random wave model, also known as long crest wave or binary irregular wave. This wave is transmitted in one direction. Its troughs and crests are parallel to each other, and the direction is vertical. in the direction of the wave. This model is recognized by most scientists and scholars. On the ITTC in 1969, someone proposed the ITTC dual-parameter spe...
specific Embodiment 2
[0134] A ship gyro stabilization control method based on a fuzzy immune controller at a low speed, characterized in that: the steps are as follows:
[0135] Step 1: Establish a random wave model;
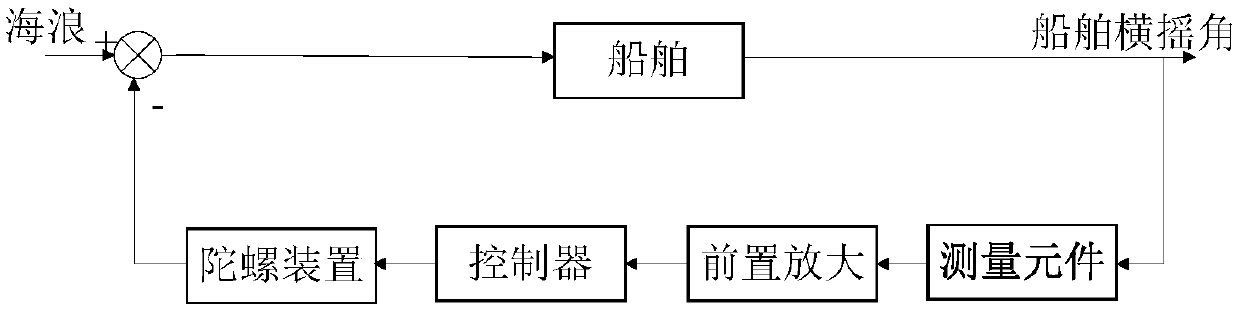
[0136] Step 2: The ship model under the low speed state, under the action of the random waves, obtain the corresponding roll angle of the ship through the measuring element.
[0137] Step 3: Establish a general model of the system, use the fuzzy immune control method to optimize the parameters of the controller, and apply the signal obtained by the measuring element to the controller to generate a corresponding control signal;
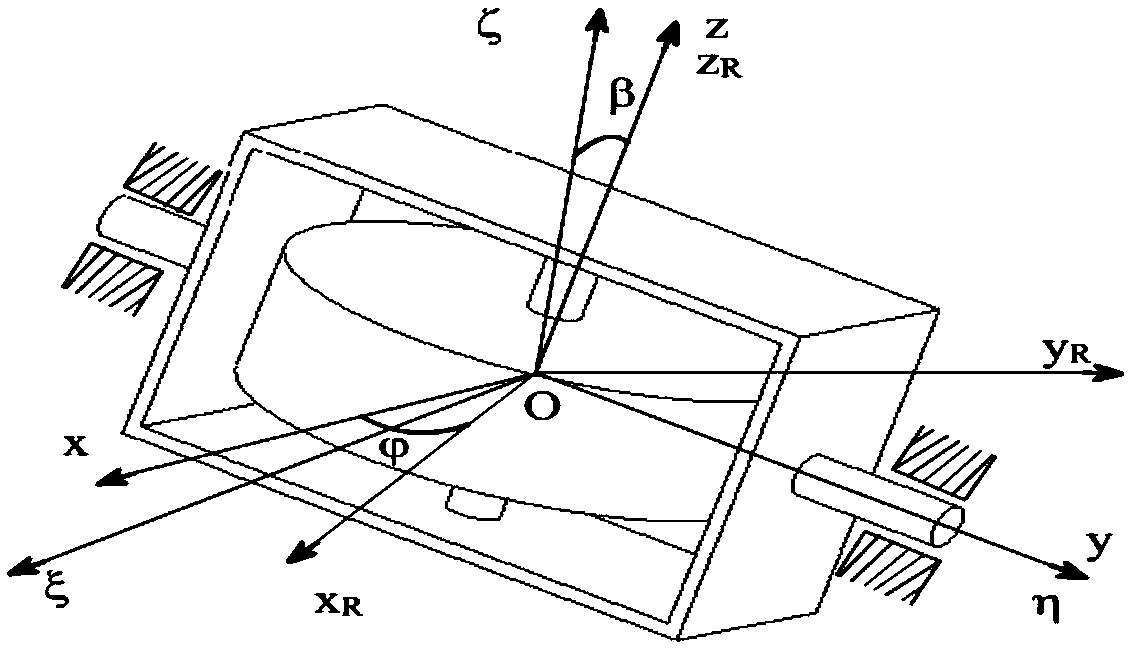
[0138] Step 4: Establish a single-frame control moment gyro dynamic model, and use two gyro stabilization devices to stabilize a working group, and apply the signal given by the controller to the gyro device, and then the gyro generates a corresponding torque to offset disturbance of waves;
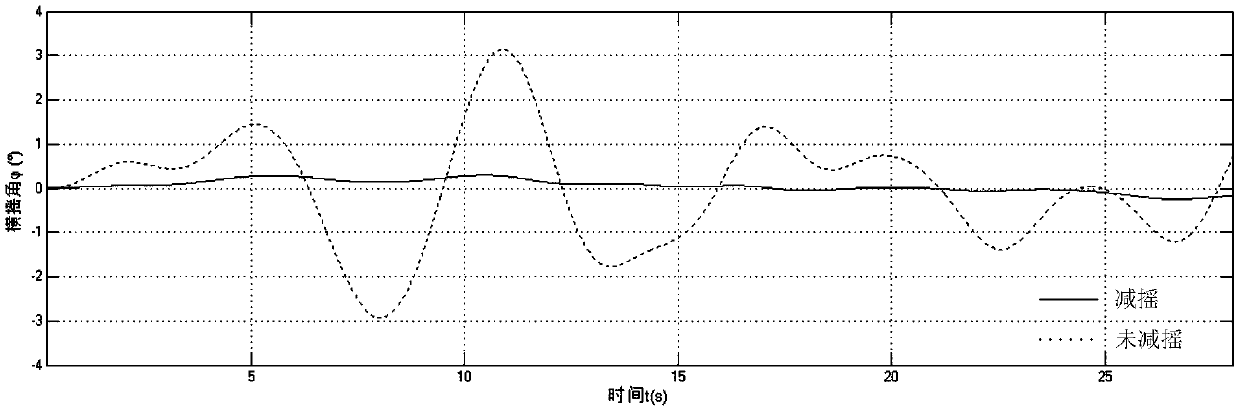
[0139] Step 5: set up simulation model in the SIMULINK of MATLAB...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More