

A robot path planning method and its vacuum cleaner
A path planning and robot technology, applied in the field of intelligent robots, can solve the problems of low efficiency of path planning and complex algorithms, etc., and achieve the effect of targeted cleaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be clearly and completely described below.
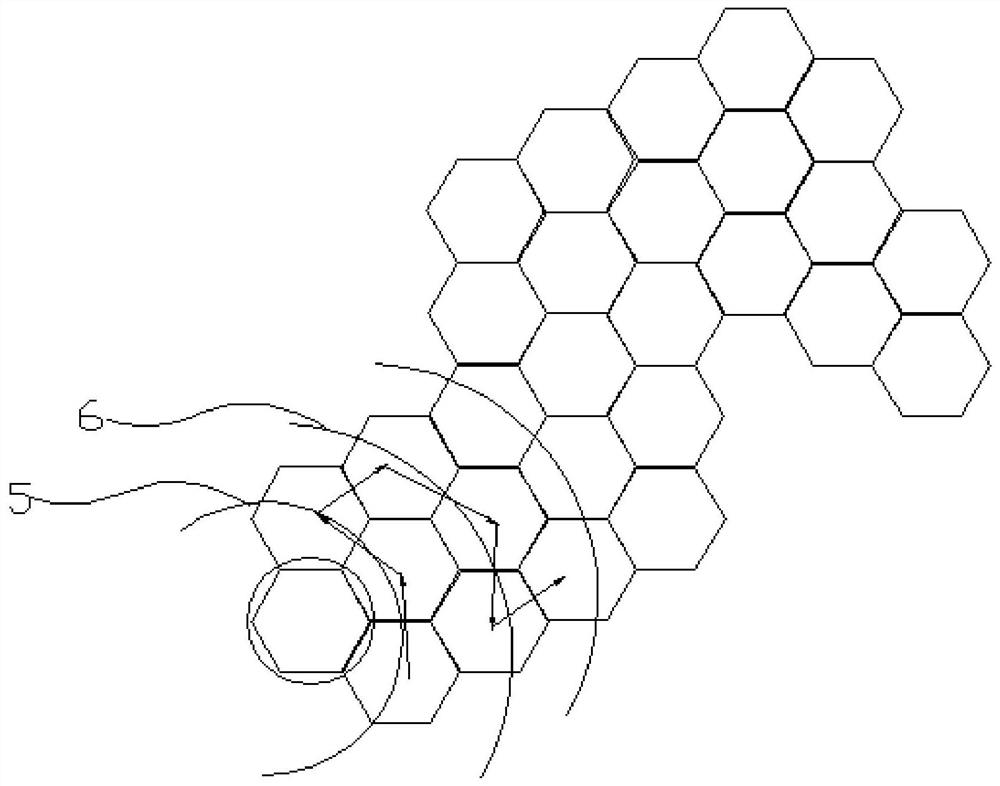
[0038] It should be noted that "inside" in the present invention refers to close to the starting point of the robot, "outside" refers to being far away from the starting point of the robot, and the orientation terms such as "outer circumference" in the present invention are all for fully explaining the path planning of the present invention method, and should not be construed as a limitation of the present invention.
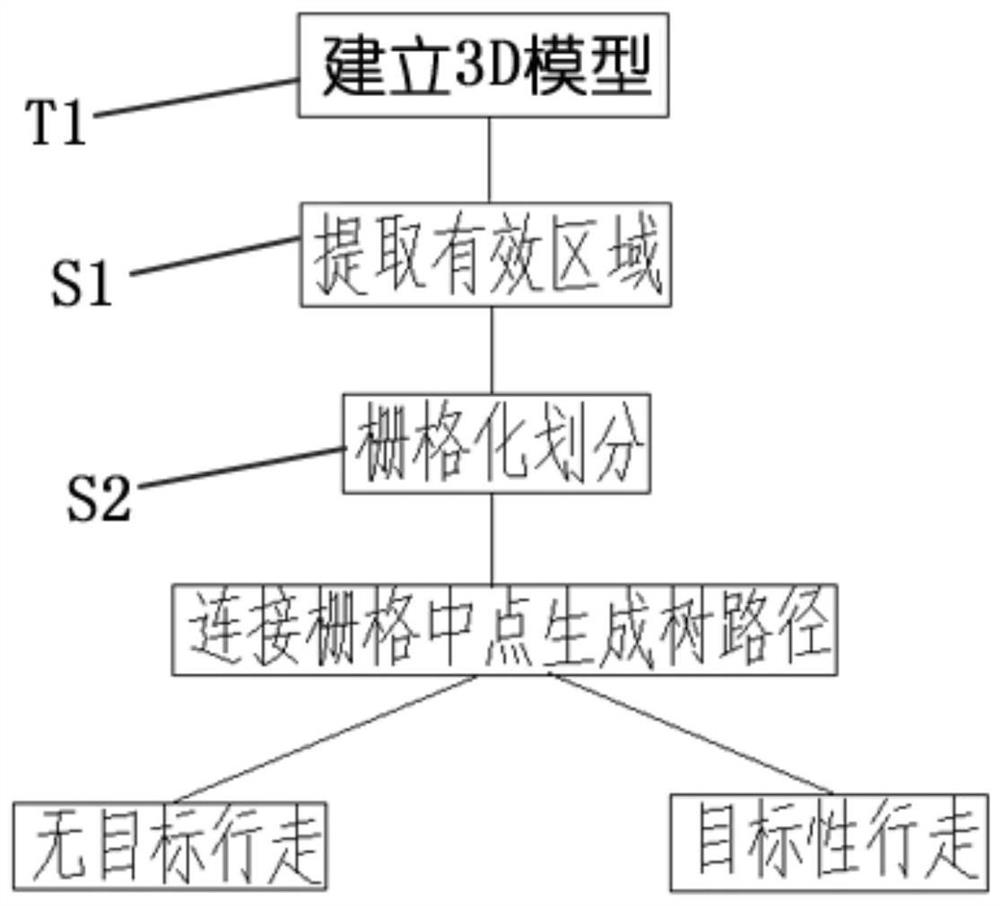
[0039] like figure 1 As shown, a robot path planning method includes the following steps:
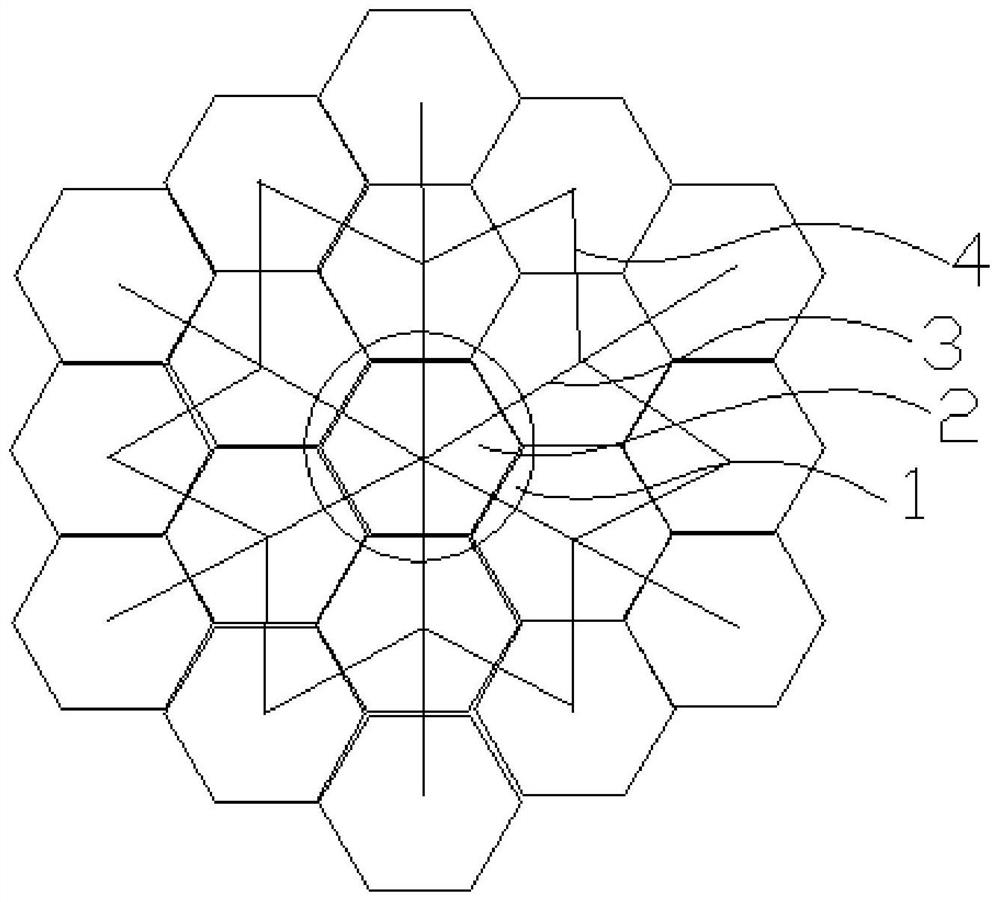
[0040] S1: Extract the effective area where robot 1 can walk in the 2D map, and divide the effective area into a grid;
[0041] S2: Connect the midpoints of the grid to generate a tree path, and the robot performs non-target walking or targeted walking according to the tree path.
[0042] Further, the method for extracting the effective area where the robot can walk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More