Novel wrist rehabilitation robot
A rehabilitation robot and wrist technology, applied in the field of medical rehabilitation equipment research, can solve the problems of complex structure, high cost, rising labor cost, etc., and achieve the effects of simple mechanical structure, easy home use and low equipment cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
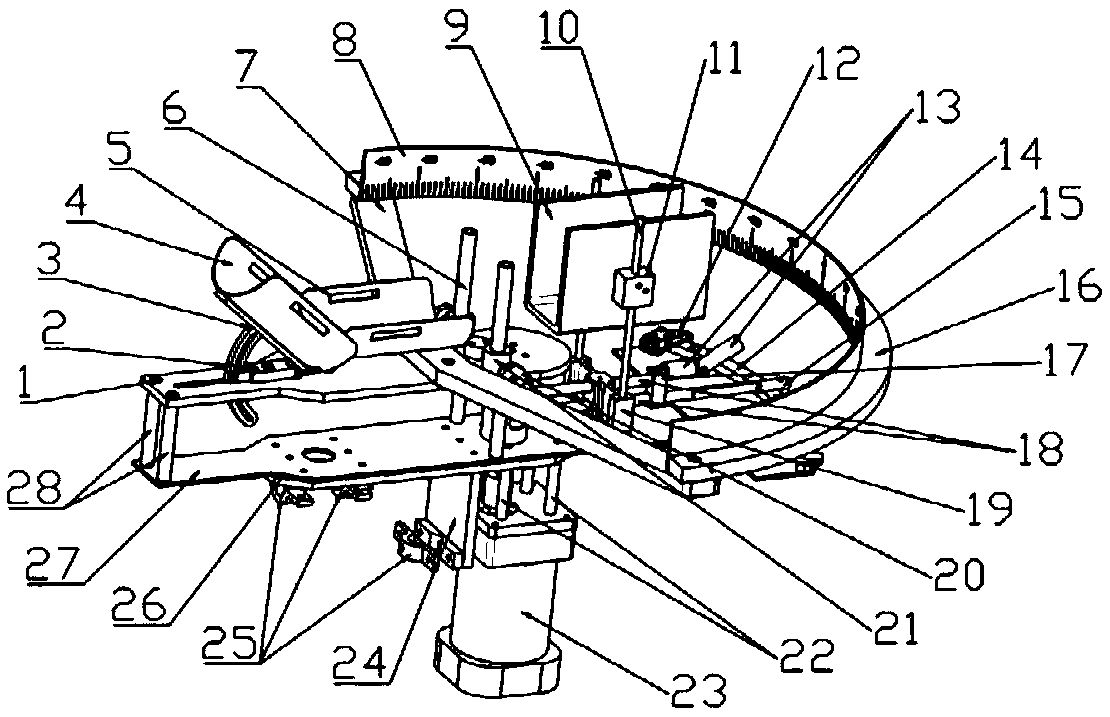
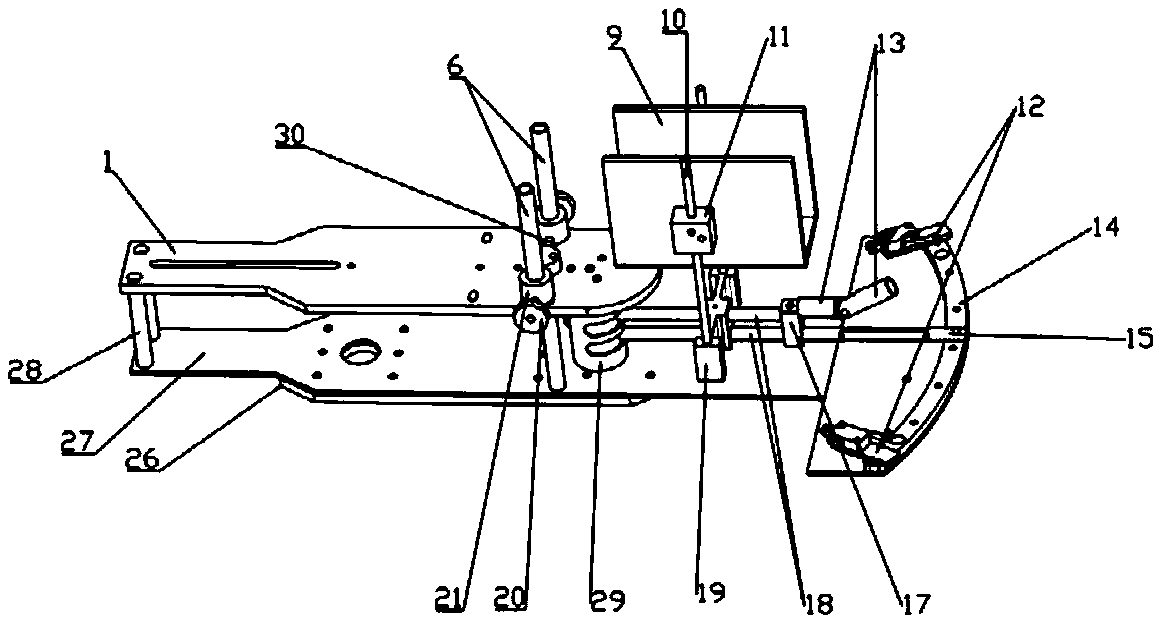
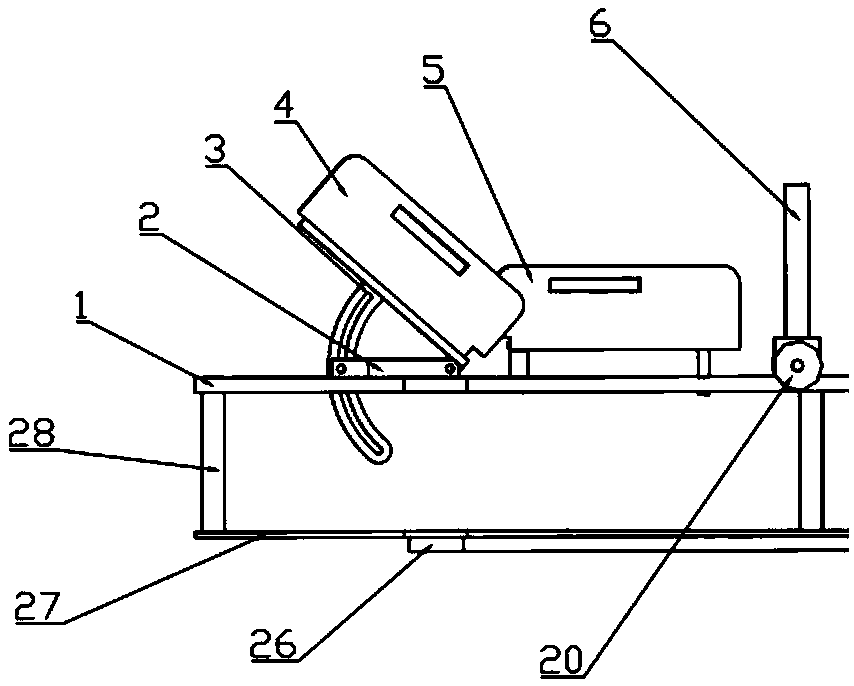
[0016] Such as figure 1 As shown, the main components of the new wrist rehabilitation robot include the angle indicator plate [8], the indicator plate fixing ring [16], the swing arm fixing ring [14], the strain gauge mounting rod [15], the laser pointer base [13], Connecting block [17]; the angle indicating plate is installed and fixed on the indicating plate fixing ring, and connected with the overall frame of the equipment, the laser pointer base is connected with the carbon fiber swing arm through the connecting block, the strain gauge installation rod is inserted into the connecting block, and It is connected to the carbon fiber swing arm through the connecting block. The specific method of use is: insert the laser pointer into the laser pointer indicating base, adjust the angle of the laser pointer up and down, and project the laser point on the angle indicating plate to indicate the angle of the swing arm; the side of the strain gauge mounting rod is equipped with a foi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More