Intelligent welding robot capable of walking and turning and capable of striding low wall
A welding robot and intelligent technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of increased wages of electric welders, slow welding speed, and high labor costs, and reduce occupational hazards and labor costs. , the effect of high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0047] Example: see Figure 1 to Figure 14 .
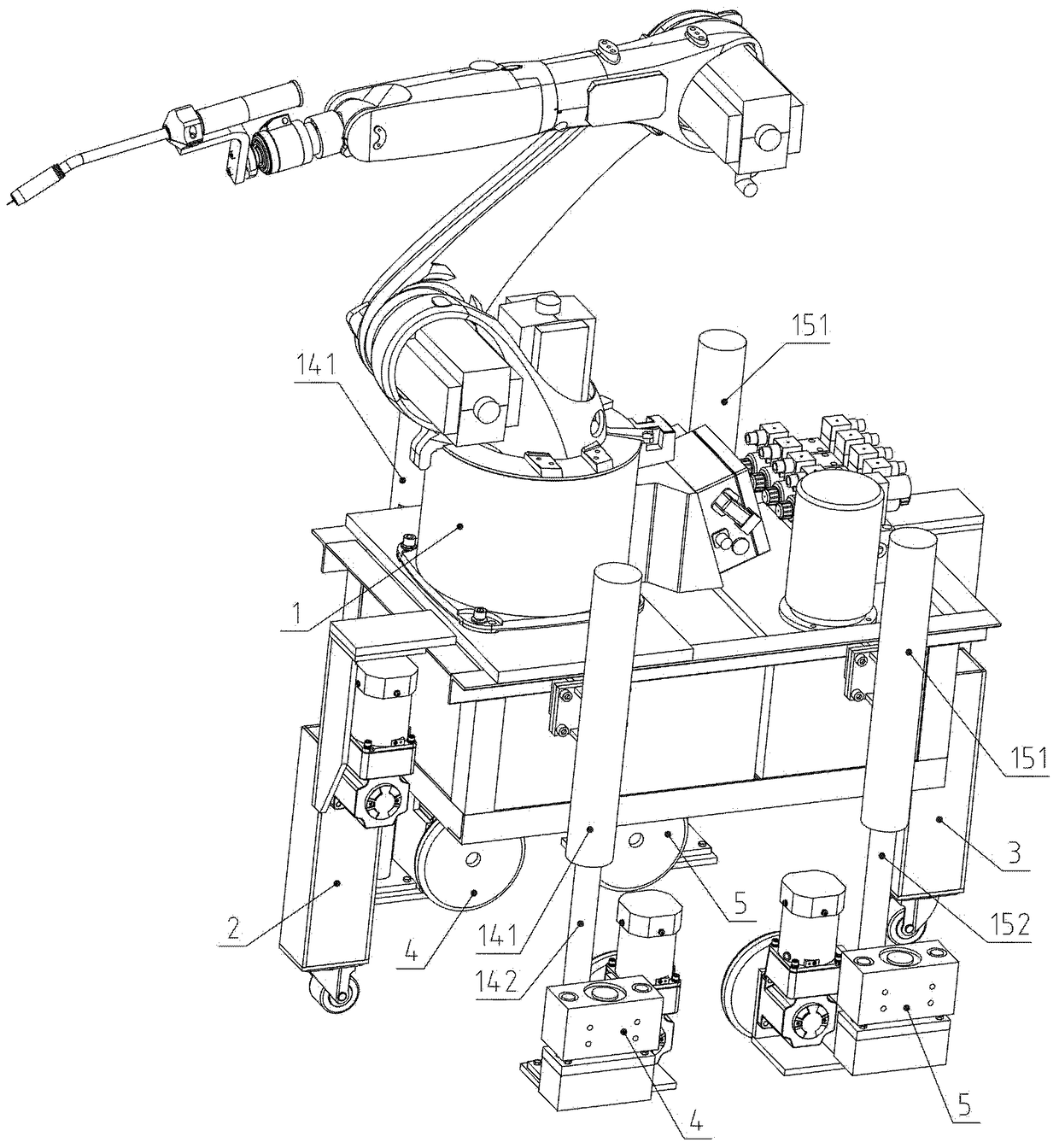
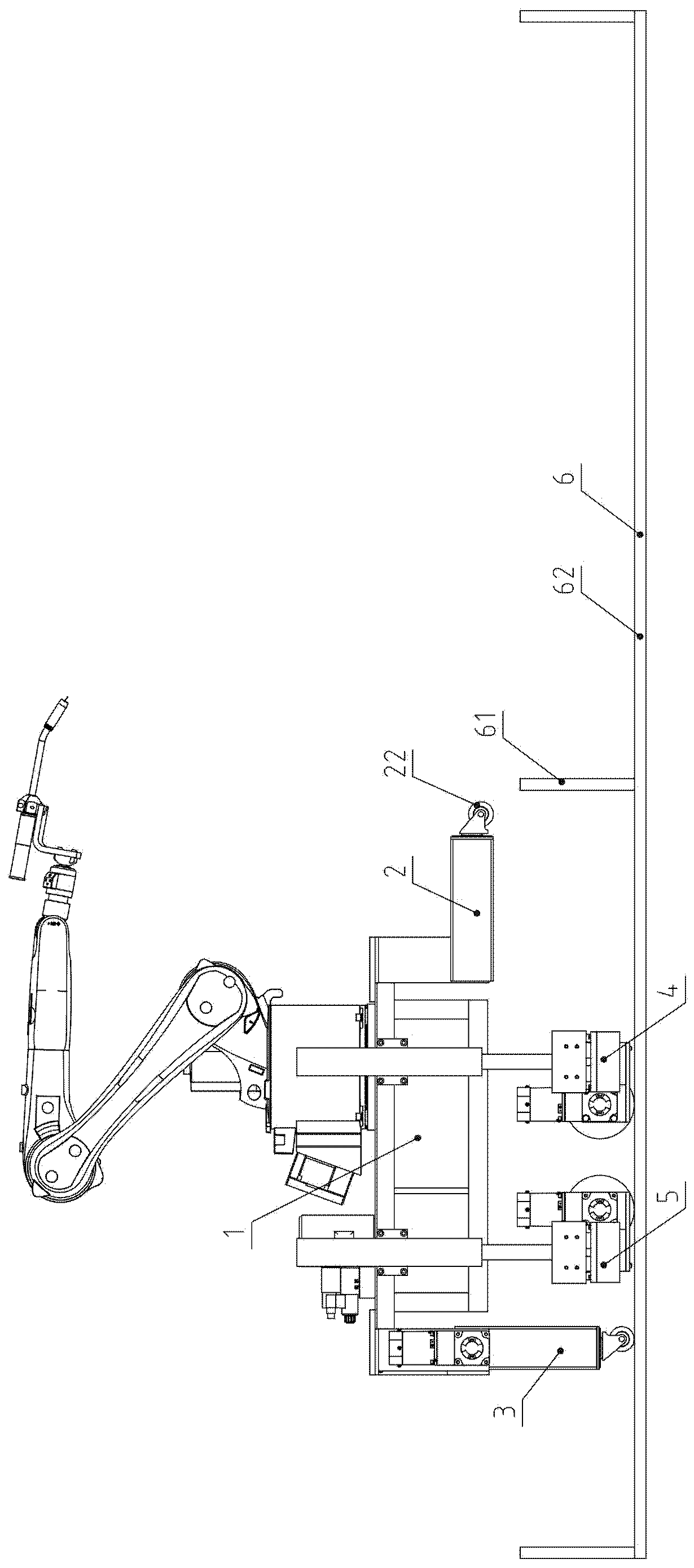
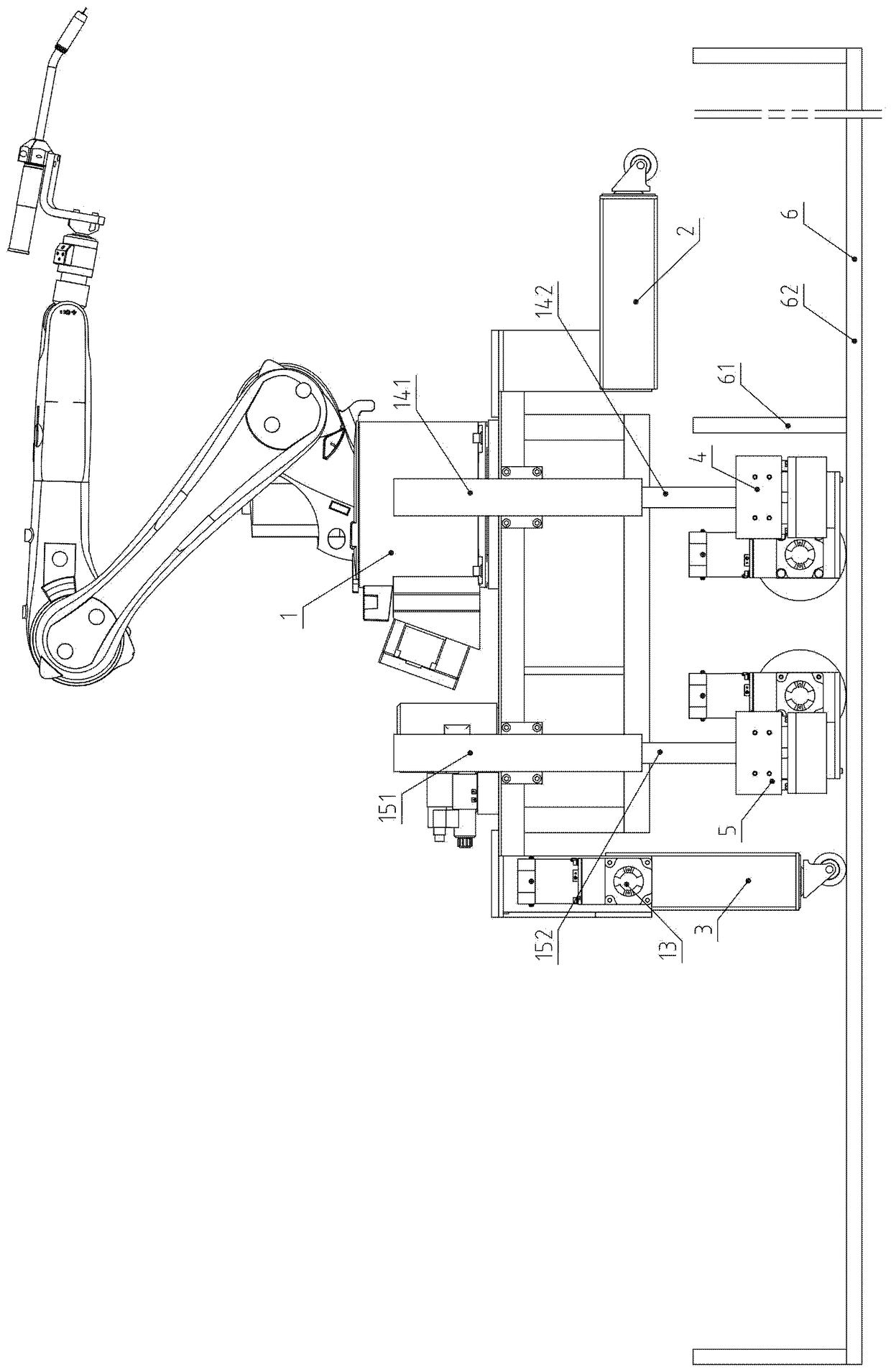
[0048] An intelligent welding robot capable of walking, turning and crossing low walls, including a body 1, a front rotating leg 2, a rear rotating leg 3, a front lifting leg 4 and a rear lifting leg 5;
[0049] Fuselage 1 comprises frame 11, front leg lifting servo motor-reducer combination 12, rear leg lifting servo motor-reducer combination 13, two front jacks 14 and two rear jacks 15; front leg lifting servo motor- The shell flange of the combination 12 of the reducer is fixedly connected to the front end of the frame 11; the shell flange of the combination 13 of the rear leg lift servo motor-reducer is fixedly connected to the rear end of the frame 11; the front leg lift servo motor-speed reducer The left and right horizontal directions of the output shaft of the combination 12 of the machine and the combination 13 of the rear leg-lifting servo motor-reducer are set; the front jack 14 includes a front cylinder body 141 and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More