

Human body rotating and displacement mapping method applied to humanoid robot
A humanoid robot and displacement mapping technology, which is applied in the fields of human-computer interaction and robot control, can solve the problems of inconvenient operation, high requirements for balance control of humanoid robots, and cumbersome teaching process, etc., and achieve the effect of convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
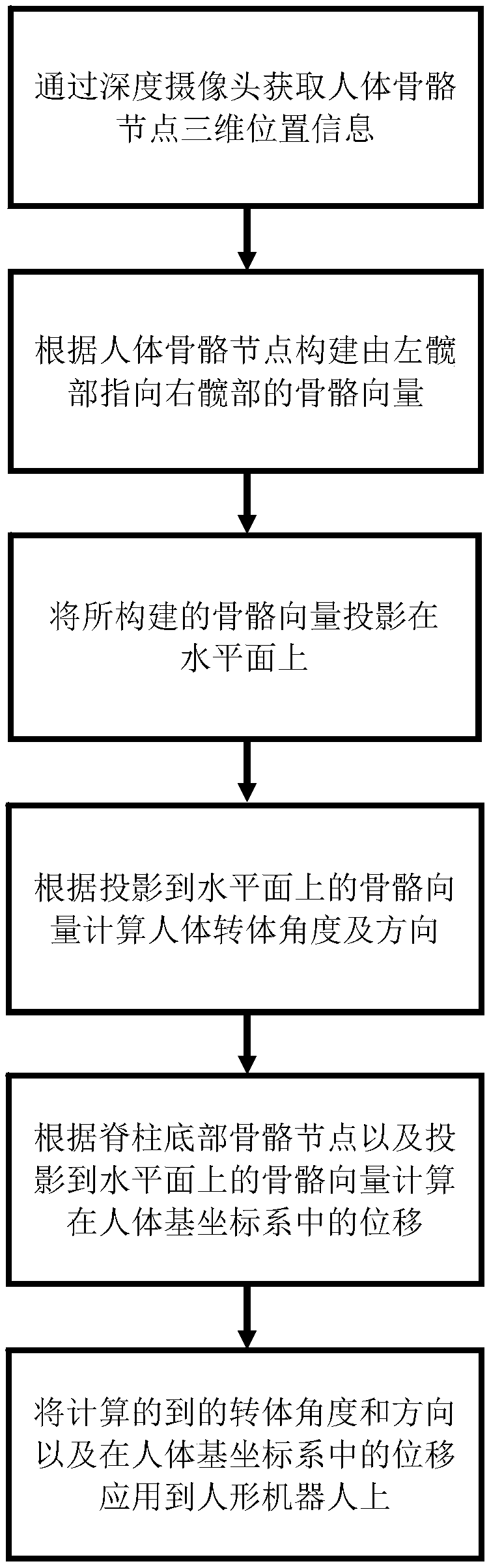
[0050] A body rotation and displacement mapping method applied to humanoid robots using Kinect II as a depth camera, as in figure 1 As shown, the method includes the following steps:
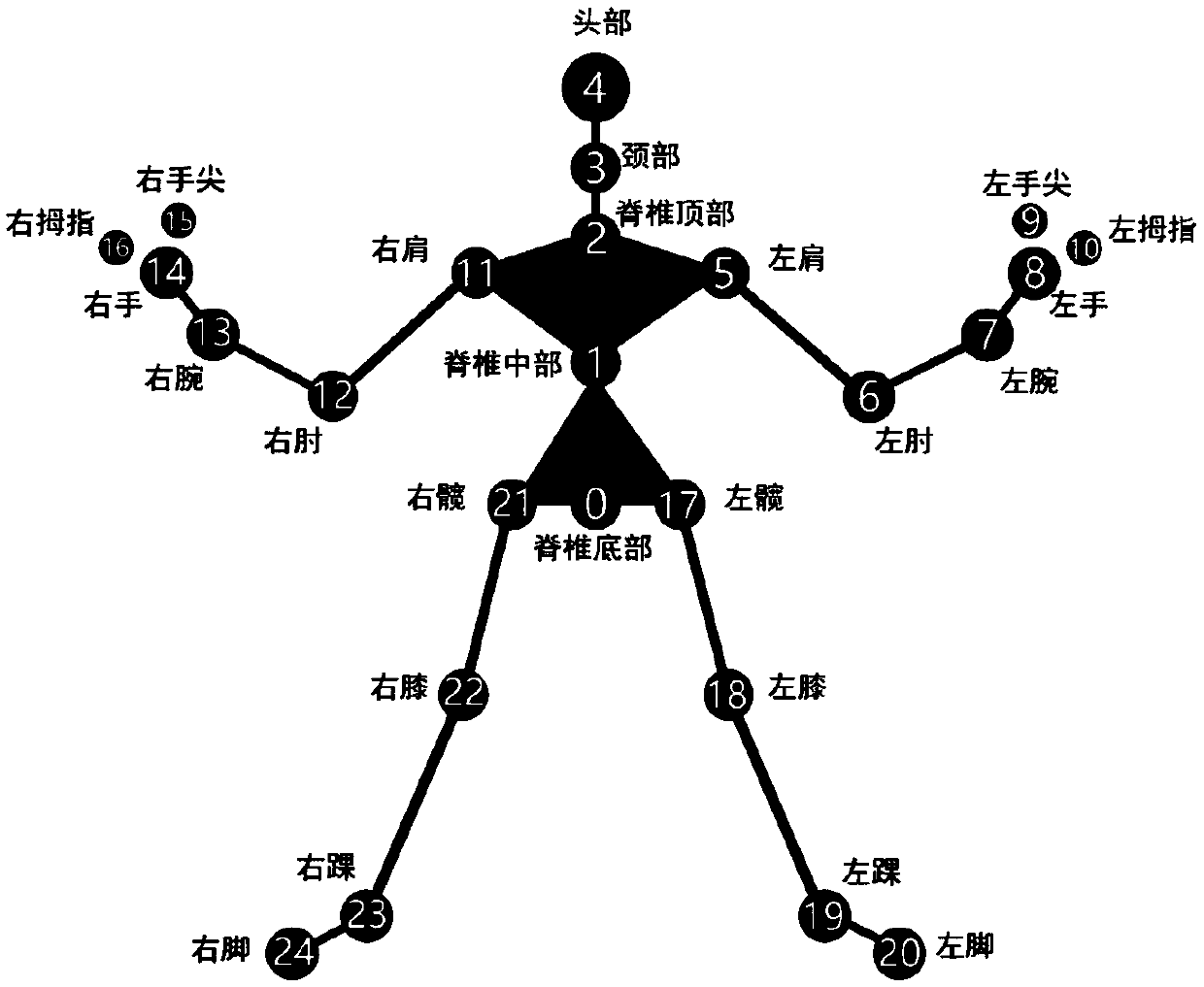
[0051] S1. Obtain the three-dimensional position information of the human bone nodes through the depth camera, including the information of the limbs and the joint points of the spine. The name and number of each bone node are as follows: figure 2 shown;
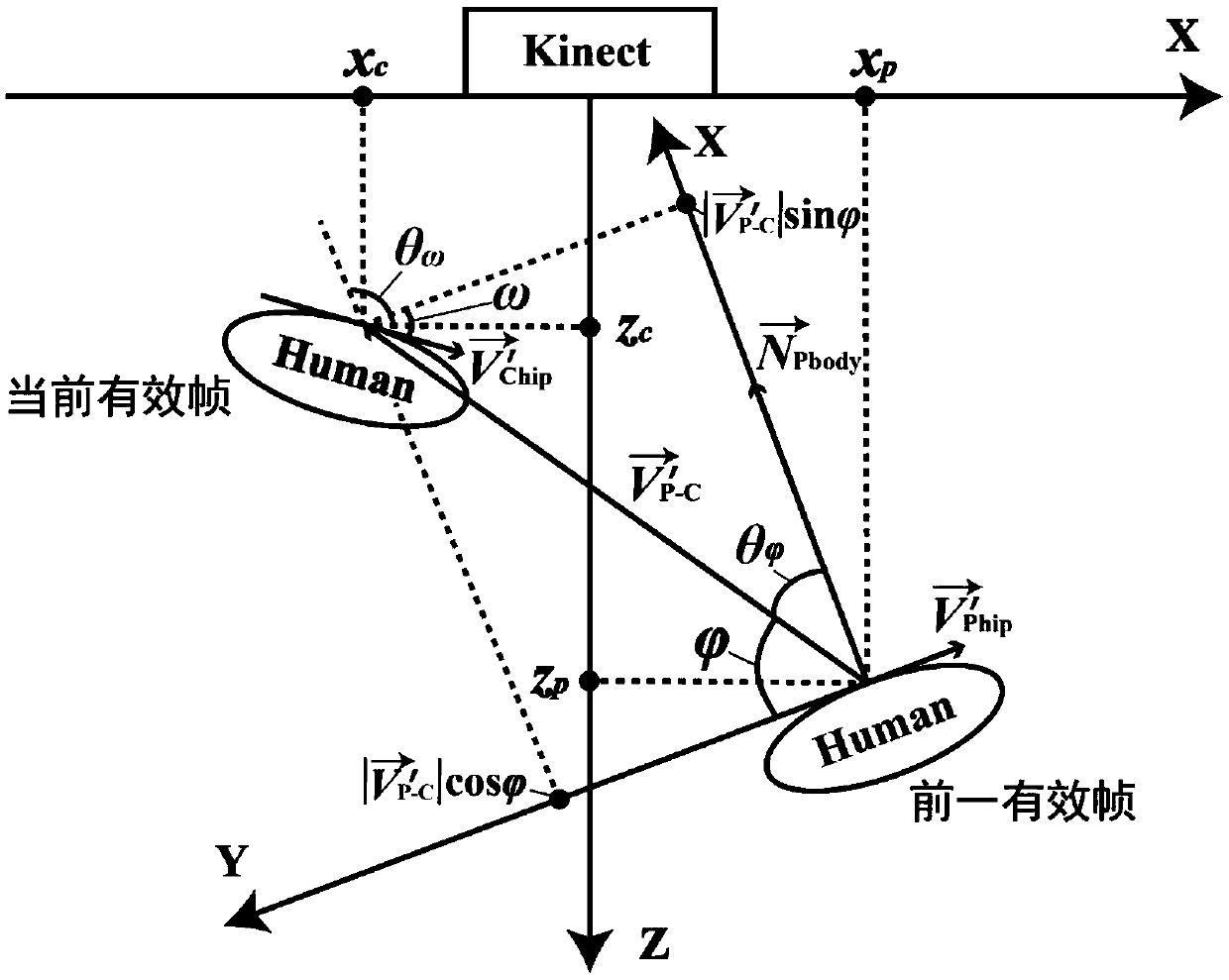
[0052] S2. Establish the bone vector according to the three-dimensional position information of the human bone node, set in the depth camera coordinate system, the bone vector pointing from one bone node to another bone node is or Among them, P represents the previous effective frame of the depth camera, C represents the current effective frame of the depth camera, a is the number of the bone node at the beginning of the vector, and b is the number of the bone node at the end of the vector. From this, the bone vector from the left hip to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More