

Method, device and system for self-adaption balance control of humanoid robot in complex terrain
A humanoid robot, balance control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as extensive limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0070] figure 1 It is an application environment diagram of a complex terrain humanoid robot adaptive balance control method provided in an embodiment, such as figure 1 As shown, in this application environment, a control system 101 and a humanoid robot 102 are included.
[0071] The control system 101 can be a tablet computer, a notebook computer, or a desktop computer, but it is not limited thereto. The control system can be composed of one or more of the above-mentioned devices, and its completed function is to realize the operation of the humanoid robot. Including programming, start and stop, receiving, storing, sending data and instructions, motion analysis, etc., but not limited to this, that is, devices that can complete the above functions fall within the scope of protection of this application.
[0072] The humanoid robot 102 can be a Nao robot or other similar types of bipedal and quadrupedal robots, mainly for tasks in different motion states. Different motion stat...
Embodiment 2
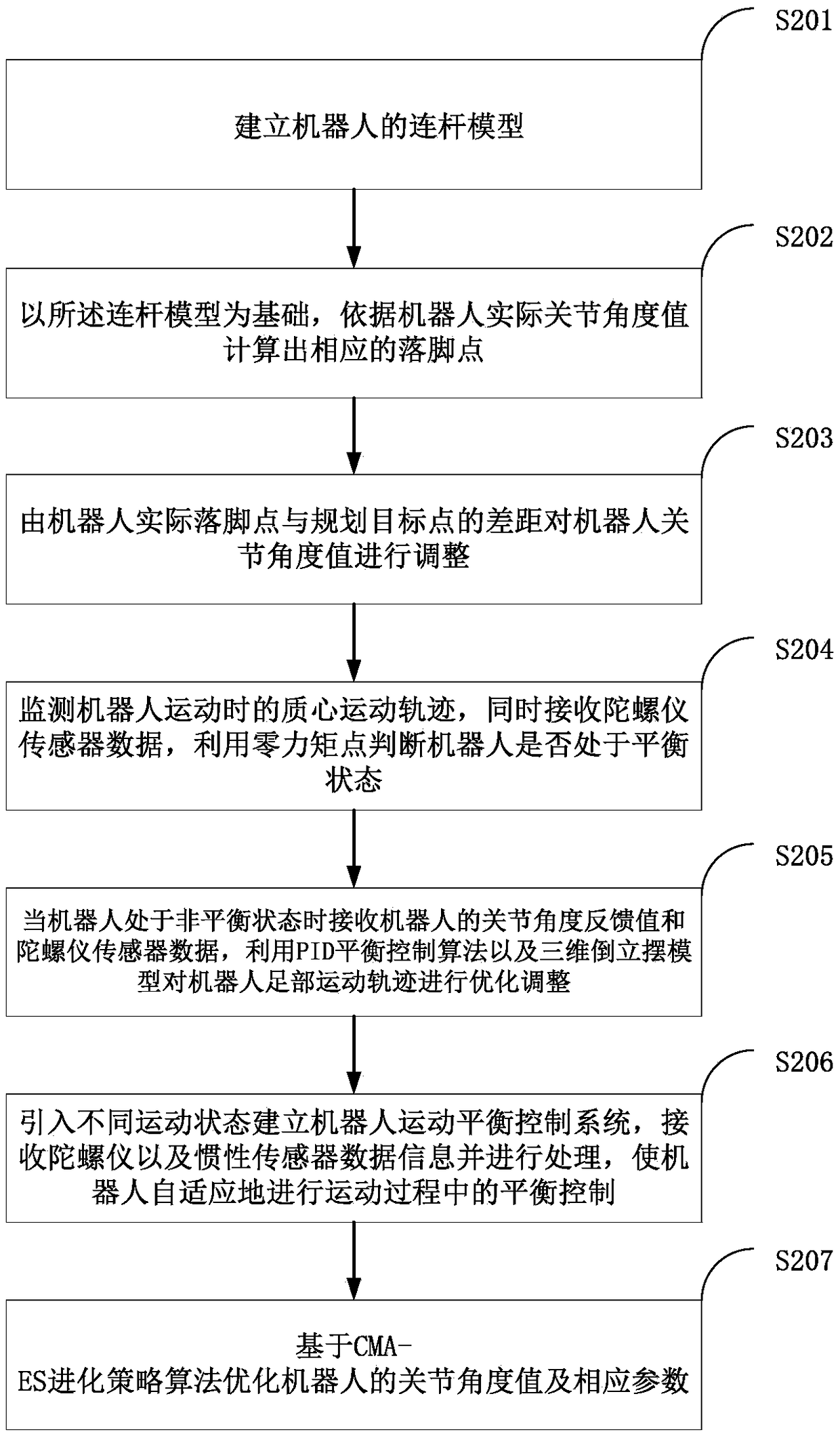
[0074] Such as figure 2 As shown, in one embodiment, a method for adaptive balance control of a humanoid robot with complex terrain is provided, and this embodiment is mainly applied to the above-mentioned figure 1 The control system 101 in (of course, the control system can also be integrated into the humanoid robot 102) is used as an example for illustration. Specifically, the following steps may be included:
[0075] Step S201, establishing a connecting rod model of the robot;
[0076] Step S202, based on the connecting rod model, calculate the corresponding foothold according to the actual joint angle value of the robot;
[0077] Step S203, adjusting the joint angle value of the robot according to the difference between the actual foothold point of the robot and the planned target point;
[0078] Step S204, monitoring the movement trajectory of the center of mass of the robot when it is moving, and receiving data from the gyroscope sensor at the same time, using the ze...
Embodiment 3
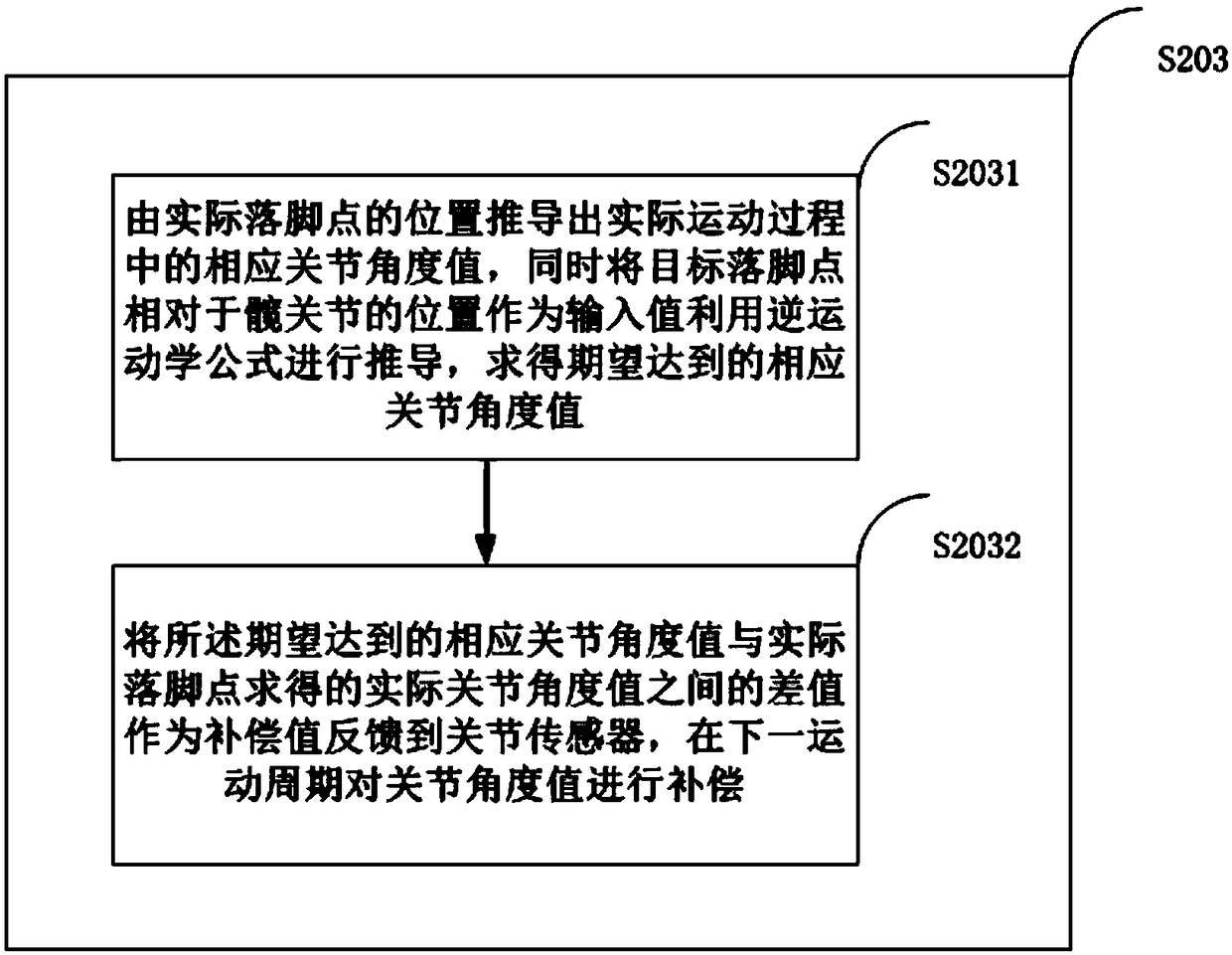
[0102] Such as image 3 As shown, in one embodiment, a complex terrain humanoid robot adaptive balance control method is given. For the convenience of description, only the parts related to the embodiment of the present invention are shown. Compared with the second embodiment, its The difference is that the difference between the actual foothold of the robot and the planned target point in step S203 adjusts the joint angle value of the robot, including:
[0103] Step S2031, deduce the corresponding joint angle value during the actual movement process from the position of the actual foothold point, and at the same time use the position of the target foothold point relative to the hip joint as an input value to derive the expected corresponding joint angle value;
[0104] Step S2032: Feedback the difference between the expected corresponding joint angle value and the actual joint angle value obtained from the actual foothold as a compensation value to the joint sensor, and compe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More