

Multi-ocean-robot cooperative circular scanning method based on distributed model predictive control
A technology of model predictive control and scanning method, which is applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of inability to realize cooperative annular scanning, limited cooperative control accuracy and performance, etc., and can solve the problem of constrained parameters Optimize problems, improve optimization synergy performance, and save costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0088] Step 1. According to the mathematical model of marine robot error, a discrete nonlinear state space expression is established:
[0089]
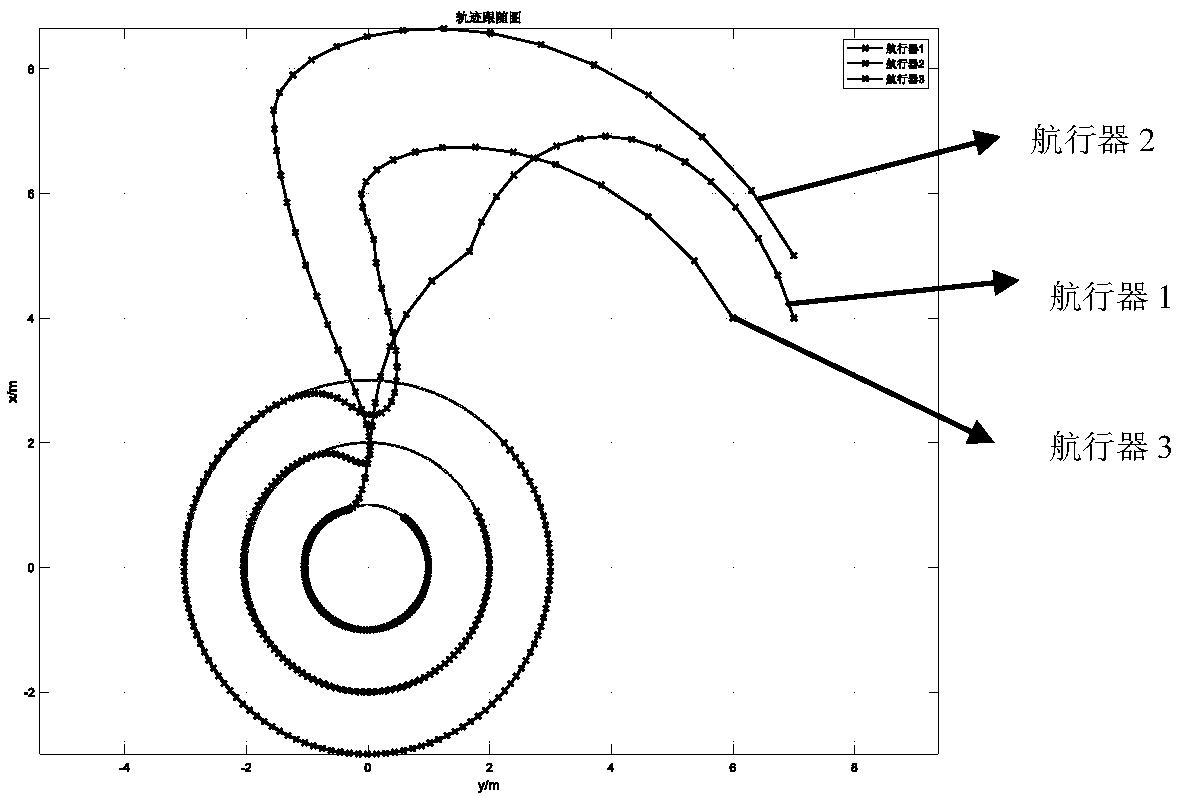
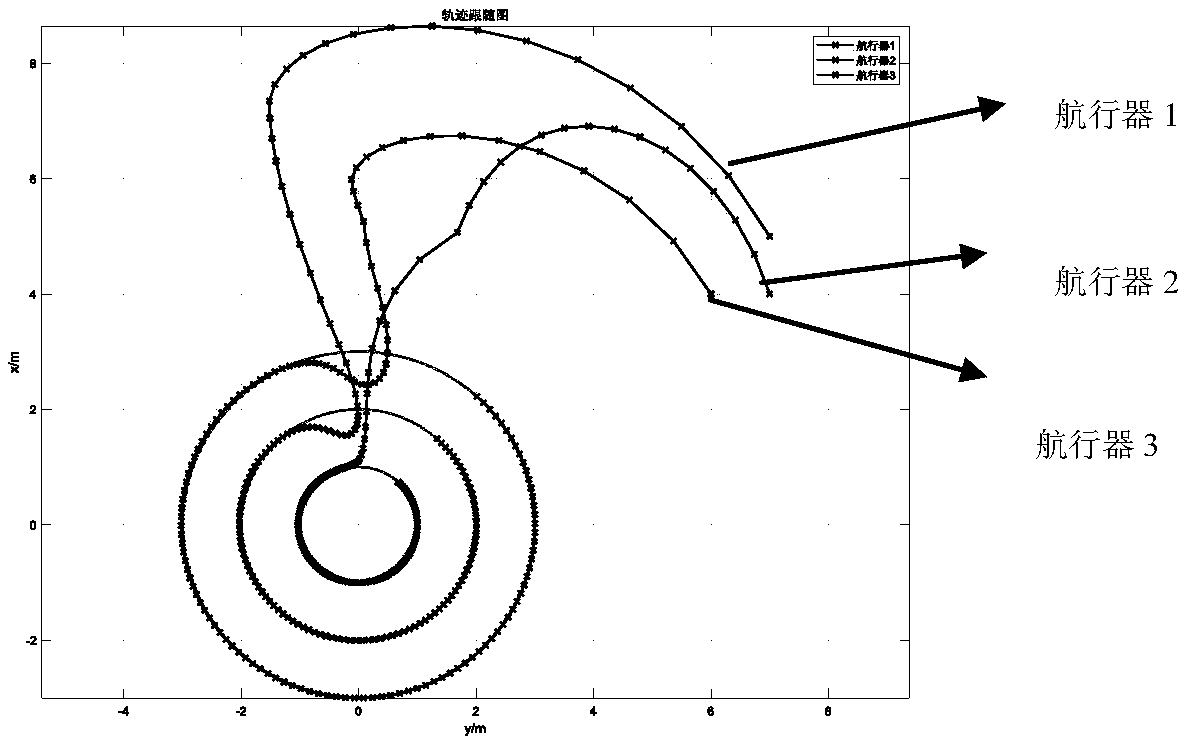
[0090] In the above formula, the discrete period T is taken as 0.1s. In this example, the number of marine robots is selected to be three, and they can maintain communication with each other. The corresponding reference trajectory curvatures are δ 1 = 1, δ 2 = 1 / 2, δ 3 =1 / 3.
[0091] Step 2. Establish the objective function:
[0092]
[0093]
[0094]
[0095] where the initial value
[0096] Reference
[0097] Q 1 =diag([8,12,25,1,0.01,0]),Q 2 =diag([8,8,20,1,0.01,0]),Q 3 =diag([10,8,30,1,0.01,0])
[0098] P 1 =diag([8,12,25,1,0.01,0]),P 2 =diag([8,8,20,1,0.01,0]),P 3 =diag([10,8,30,1,0.01,0])
[0099] R 1 =diag([0.01,0.01,5]), R 2 =diag([0.02,0.02,5]),R 3 =diag([0.02,0.02,9])
[0100] Q 12 =Q 13 =10,Q 21 =Q 23 =12,Q 31 =Q 32 =14
[0101] In Synergy Metrics¶ j The initial value is set to 0
[01...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More