

Disturbance observer based MEMS gyroscope prediction performance non-singular sliding-mode control method
A technology of interference observer and preset performance, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of not considering external interference, and the tracking error cannot be pre-designed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
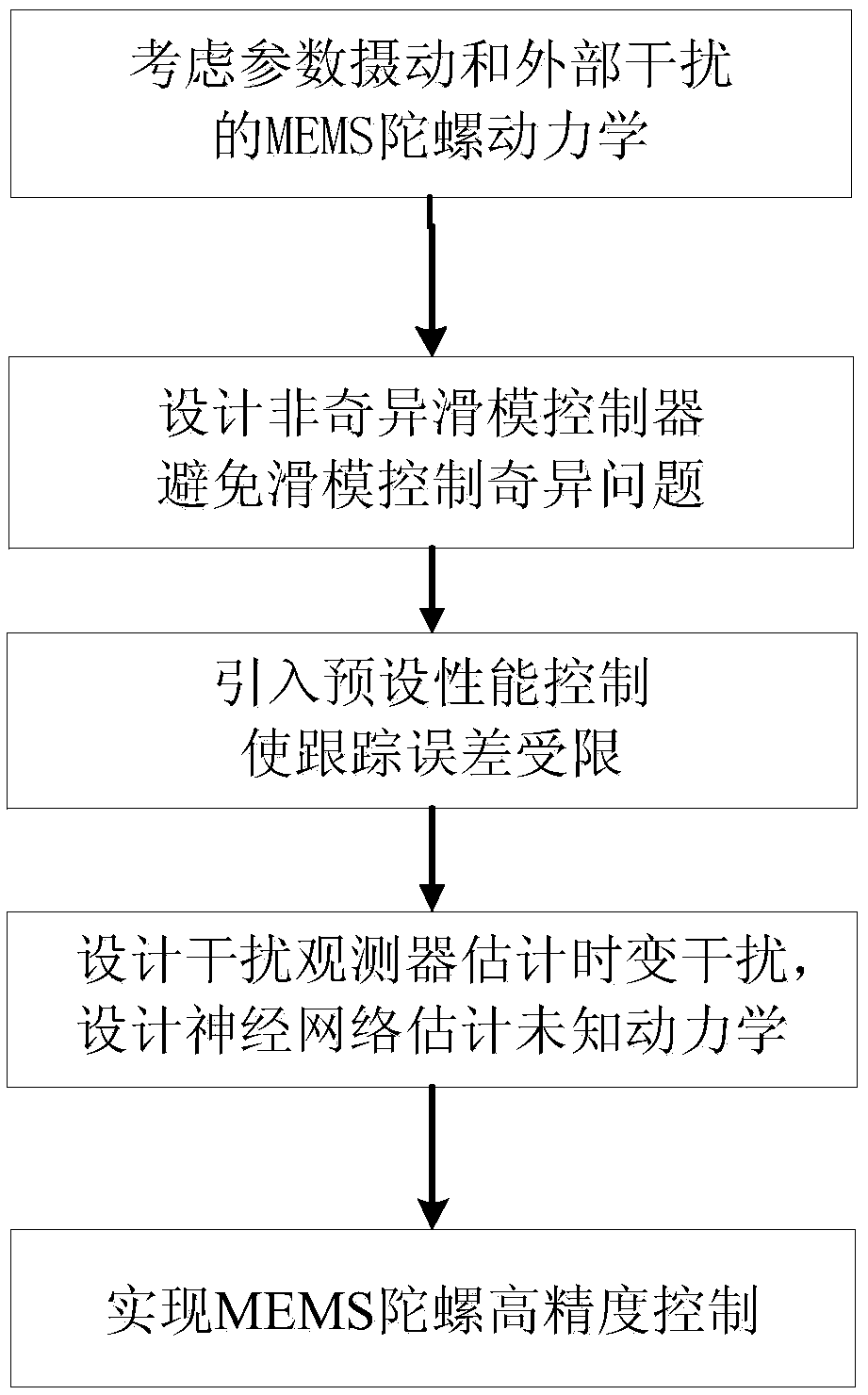
[0125] Example: such as figure 1 as shown,
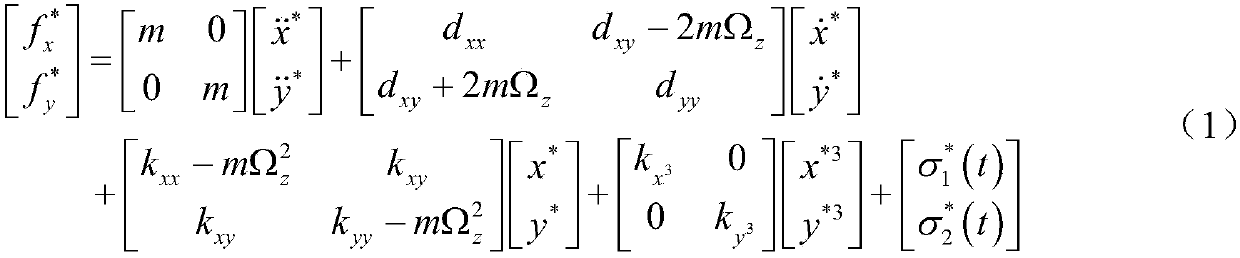
[0126] (a) The MEMS gyro dynamics model considering the parameter perturbation and external time-varying disturbance is:
[0127]
[0128] Among them, m is the mass of proof mass; Ω z Input the angular velocity for the gyro; and x * are the acceleration, velocity and displacement of the MEMS gyroscope proof mass along the drive axis; and y * are the acceleration, velocity and displacement along the detection axis, respectively; and is the electrostatic driving force; d xx and d yy is the damping coefficient; k xx and k yy is the stiffness coefficient; and is the nonlinear coefficient; d xy is the damping coupling coefficient, k xy is the stiffness coupling coefficient; and are the time-varying disturbances along the drive axis and the detection axis, respectively, and are selected according to the simple harmonic motion after Fourier transform of the vibration. and in and is the nominal value of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More