

Manipulator repeated positioning accuracy measuring device and method based on digital speckle interference
A technology of repeated positioning accuracy and measuring device, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to directly realize attitude measurement and multi-point measurement, low measurement accuracy, and high environmental requirements, and achieve digital attitude adjustment. Flexible and convenient, high measurement accuracy, strong anti-interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
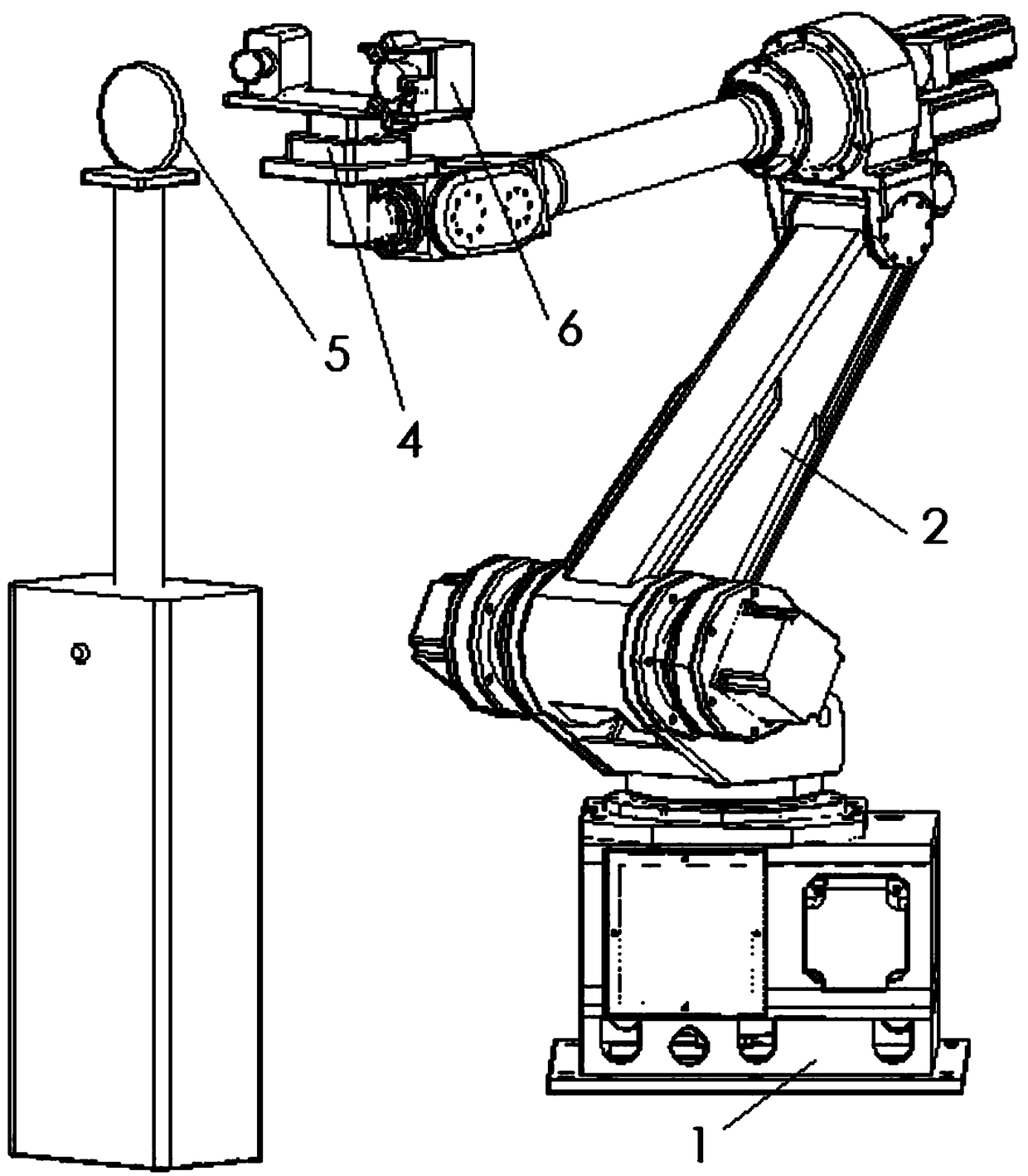
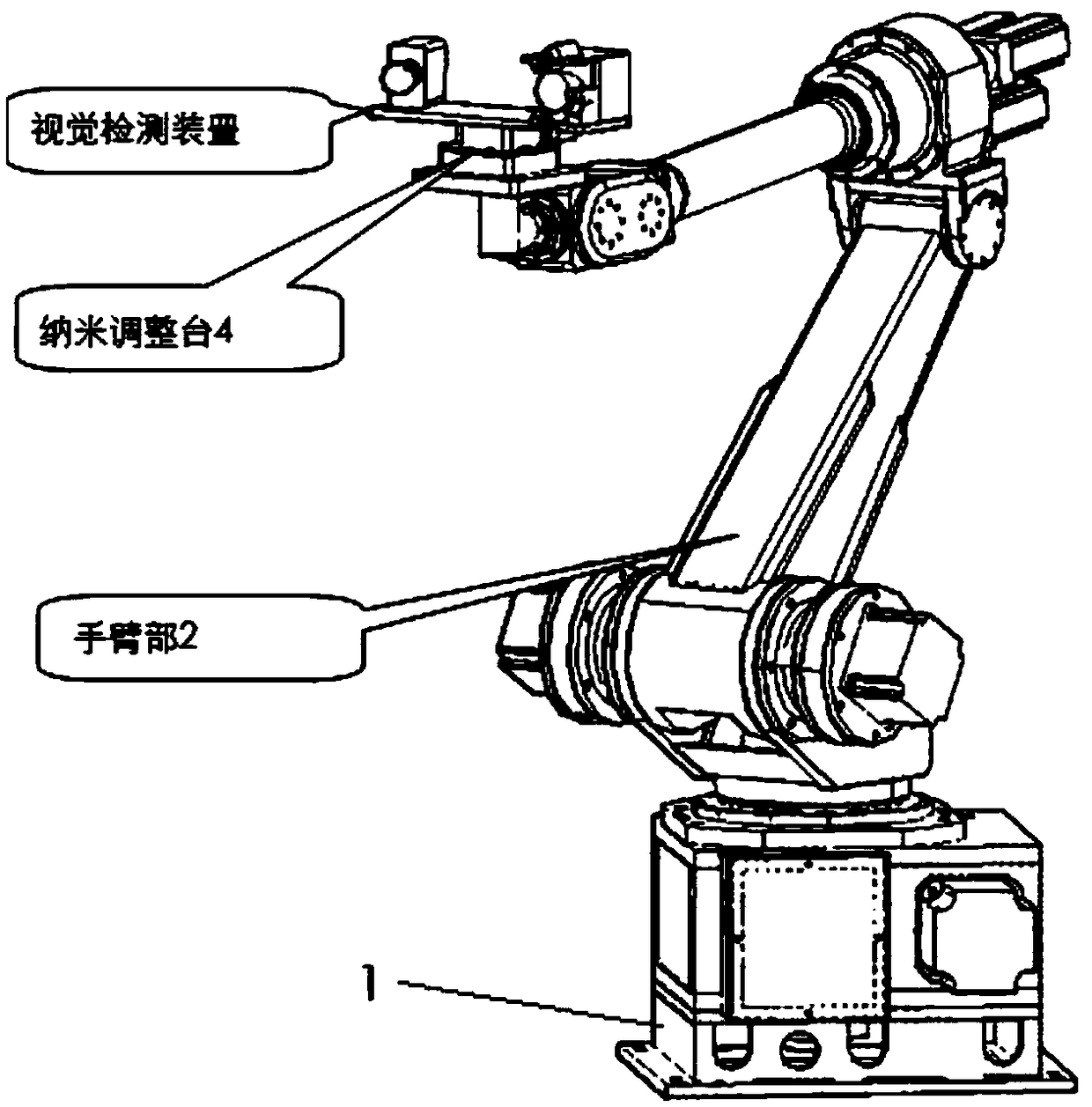
[0060] Figure 1 to Figure 7 It shows a specific embodiment of the device for measuring the repetitive positioning accuracy of a manipulator based on digital speckle interference in this application, which includes a manipulator, and the manipulator includes: a base 1, an arm part 2, a claw part (not shown in the figure) and Manipulator controller 3. Wherein the head end of the arm part 2 ( figure 1 The lower end) is connected to the aforementioned base 1, and the end of the arm portion 2 ( figure 1 middle and upper end) to install the aforementioned claws. When working, the arm part 2 moves to drive the claw part at the end to move to the working position, and then the claw part moves to directly grab / release the corresponding workpiece. The manipulator controller 3 is electrically connected with the aforementioned arm portion and the gripper portion, so as to control the movement of the aforementioned arm portion and the gripper portion. The base 1 is a fixed part, and...
Embodiment 2
[0085] Figure 8 It shows the second specific embodiment of the device for measuring the repetitive positioning accuracy of the manipulator of the present application. The difference from the first embodiment above is that the positions of the positioning target 5 and the visual detection device are exchanged in this embodiment. specifically:
[0086] The nano-adjustment table 4 is arranged at the end of the manipulator arm 2, the positioning target 5 is installed on the nano-adjustment table 4, the visual inspection device composed of the positioning camera 6 and the laser generating unit is arranged near the manipulator base 1, and the positioning camera 6 and the laser The position of the light emitting element at the end of the generating unit and the base 1 is relatively fixed.
[0087] The working principle of this embodiment is basically the same as that of Embodiment 1. During precision measurement, the pose of the positioning target is adjusted through the action of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More