Parameter robust setting method for linear active disturbance rejection control (LADRC)
A linear active disturbance rejection and parameter tuning technology, which is applied in the control field and can solve problems such as clear requirements for robust performance.
Inactive Publication Date: 2018-11-30
NORTH CHINA ELECTRIC POWER UNIV (BAODING)
View PDF3 Cites 8 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] The PID controller commonly used in industrial process control has a tuning formula with satisfactory results for the first order plus dead time (FOPDT) object model, such as the common Z-N method, IMC method, SIMC method and AMIGO method. At present, LADRC still lacks a method that uses the object model to directly tune the controller parameters and has clear requirements for robust performance.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment
[0163] The transfer function of the given controlled object is
[0164]
[0165] The reduced-order model obtained by the method described in step S5 is
[0166]
[0167] According to the tuning formula described in (25), the controller parameters are obtained as:
[0168] b=4.4087, ω c = 3.3113, ω o =3.0108
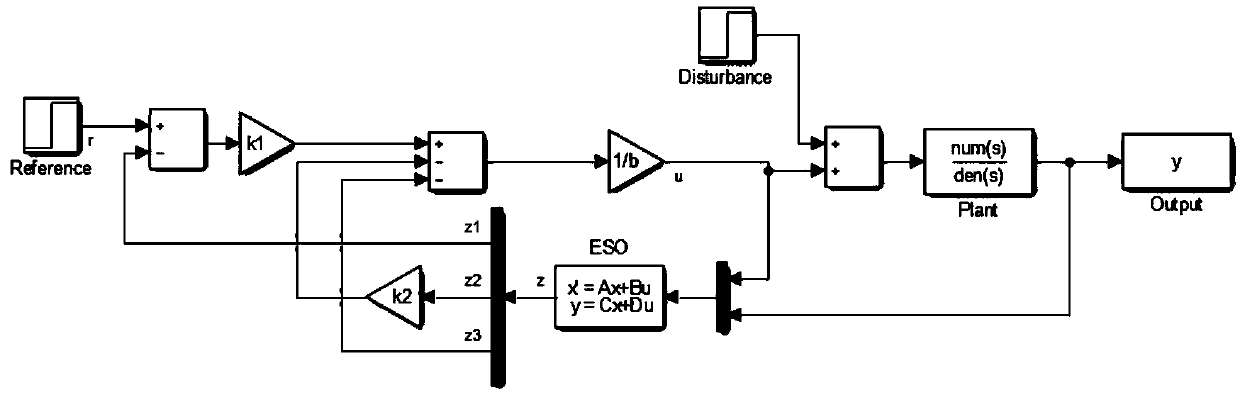
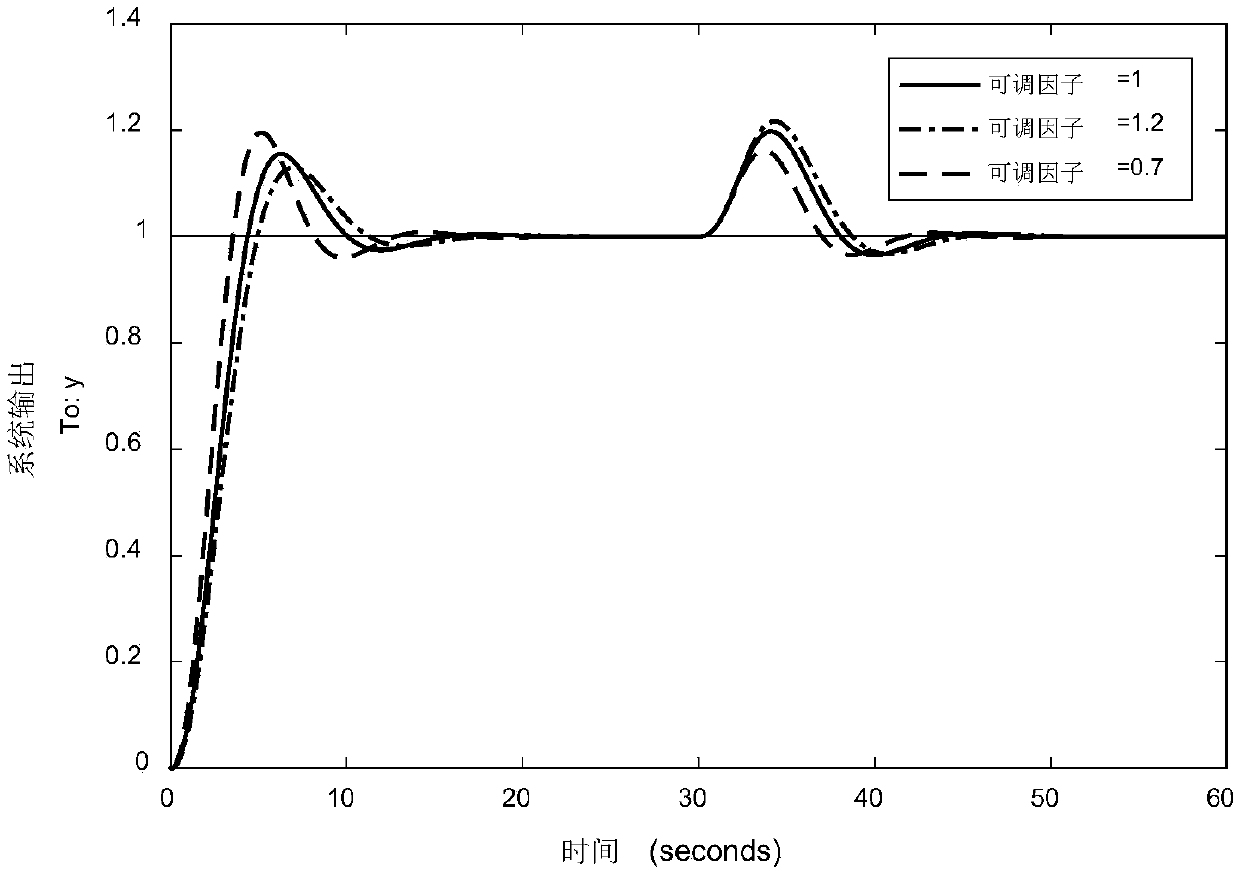
[0169] by attaching figure 1 The shown controller structure simulates the control of the actual controlled object. The system reference input is set as a step signal with an amplitude of 1. After the system is stable, an interference signal with an amplitude of 0.5 is added. The adjustable factors are respectively 1, 1.2 and 0.7, the system tracking and anti-disturbance results are obtained as figure 2 shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention relates to the technical field of control, and provides a parameter robust setting method for a linear active disturbance rejection control (LADRC). The method employs a second-order LADRC, a setting formula of controller parameters b, Omega c and Omega o, which conform to robust performance constraint, is obtained by numerical value simulation with regards to a first order plus deadtime (FOPDT), and the method is promoted to an ordinary industrial controlled object. The LADRC set by the method can obtain relatively good control performance, is high in robustness and relativelygood in disturbance resistance; and moreover, an adjustable factor is provided, slight adjustment can be performed according to requirements of control performance of different objects, the model applicability is relatively high, and the operability is good.
Description
technical field [0001] The invention relates to the technical field of control, in particular to a robust tuning method for parameters of a linear active disturbance rejection controller. Background technique [0002] The idea of Active Disturbance Rejection Control (ADRC) appeared around 1995 and was first proposed by Chinese scholar Han Jingqing. On the basis of analyzing PID, Han Jingqing proposed the concept of nonlinear PID, and then summarized and developed the ADRC technology. Its core idea is to regard the internal uncertainties and external disturbances of the system as the total disturbance, and estimate the system state and the total disturbance together through the Extended State Observer (ESO), and then integrate the disturbance into the control law Compensate, so that the system is converted into an integral series object, and the tracking and anti-disturbance goals are achieved through feedback control. The early ADRC adopts nonlinear control strategy, and...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05B13/04
CPCG05B13/042
Inventor 李健谭文张彬文
Owner NORTH CHINA ELECTRIC POWER UNIV (BAODING)