

A wearable full-joint two-way force feedback integrated closed-loop control device and method
A control device and force feedback technology, which is applied in the direction of program control, general control system, program control manipulator, etc., can solve the problem that wearable follow-up teleoperation equipment cannot perform fine micro-operation, poor kinematics and dynamic characteristics of robot action, Problems such as the inability to accurately drive the end effector of the robot can achieve the effect of improving the sense of immersion in the scene, improving the practicality and convenience, and improving the accuracy and real-time degree of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
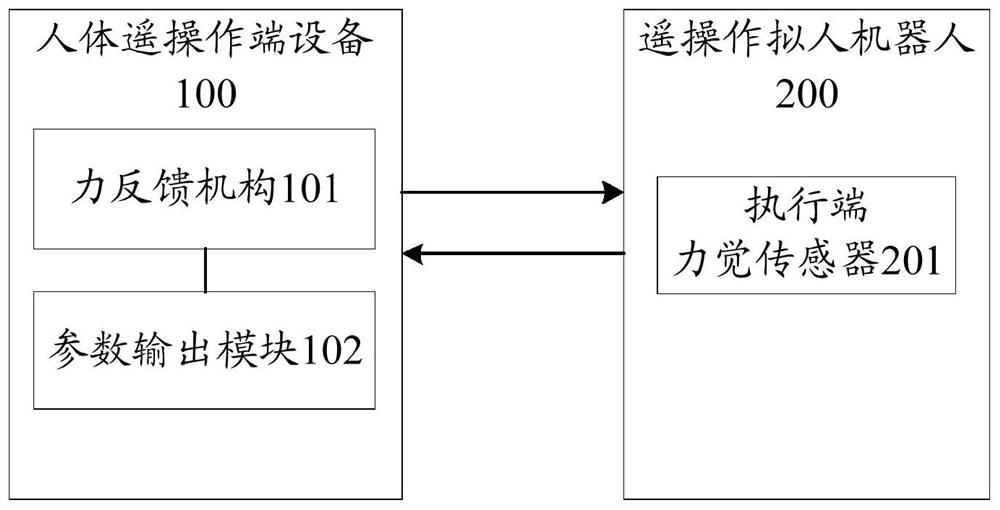
[0045] Current wearable control devices usually only collect the joint rotation angle of human body movements, and directly output the parameters to the joints of the robot to drive the robot to produce the same movements as humans, without collecting the kinematics and dynamics parameters of human joints , the parameters of the joint force characteristics are not collected and utilized, so that the robot's motion characteristics and dynamic characteristics are inconsistent with the human body's motion characteristics. Especially for the motion process with minimal changes in joint angle parameters (such as human grasping / releasing action process), the use of joint angle control has a large motion delay, resulting in obvious ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More