

Data point merging based frequency modulated continuous wave radar target parameter estimation method
A frequency-modulated continuous wave and parameter estimation technology, which is applied to radio wave measurement systems and instruments, can solve problems such as large parameter estimation errors and inaccurate determination of the number of targets, and achieve the effect of improving the distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
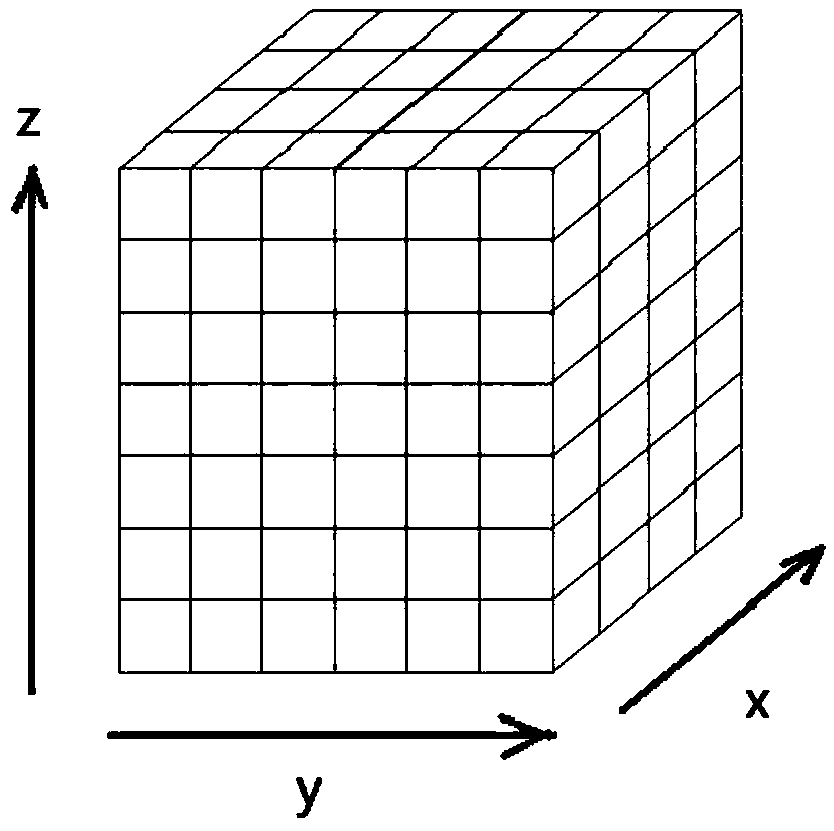
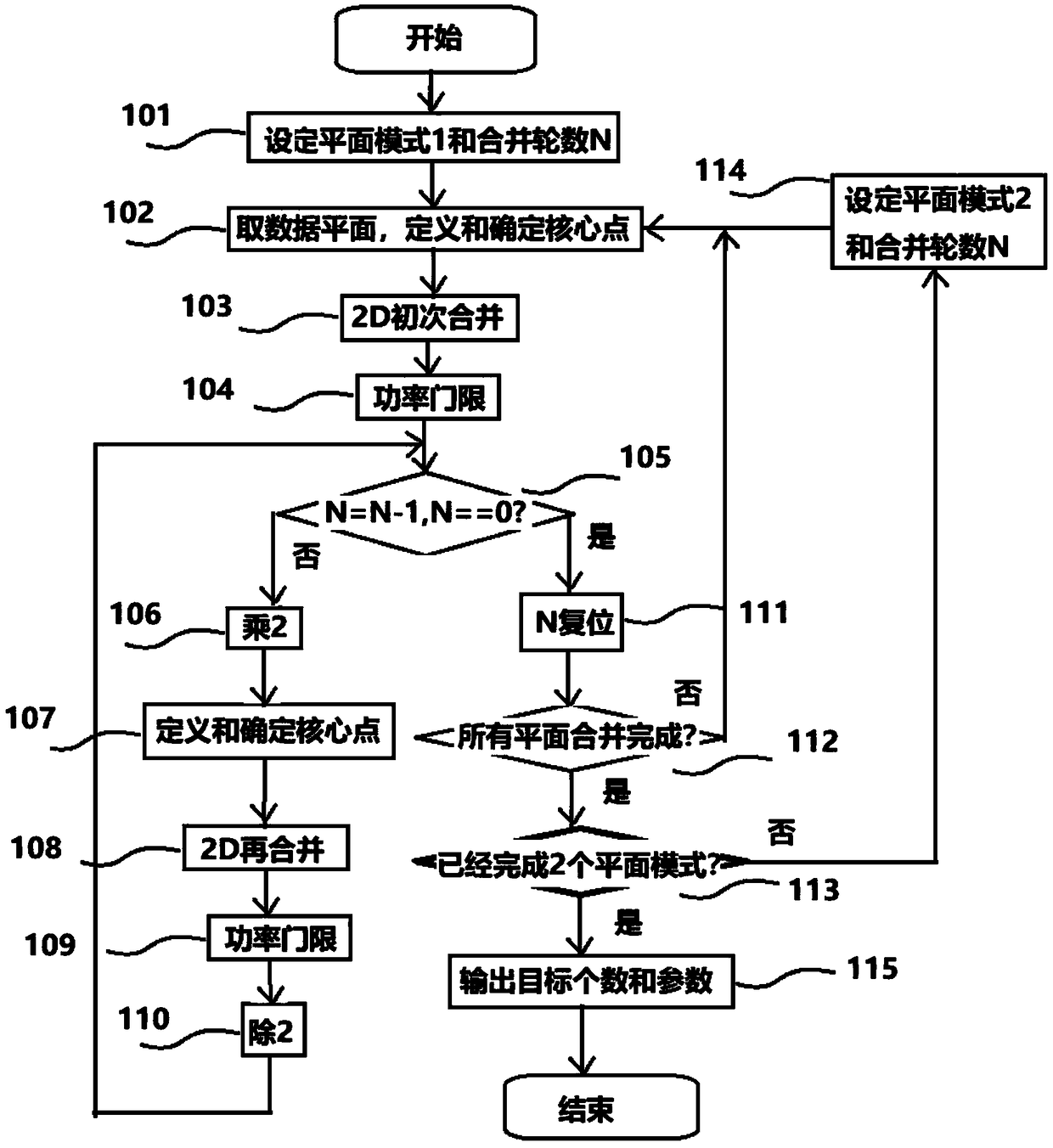
[0067] see Figure 1-7 , an embodiment of the present invention provides a target parameter estimation method based on data point merging provided by the present invention. like image 3 As shown, the method consists of the merging of two planar modes.
[0068] Step 101: Determine the plane mode 1, and the merging will be performed on all the planes thus divided. In the following description of the merging method, only the x-y plane mode is used as an example. Set the number of merge rounds N.
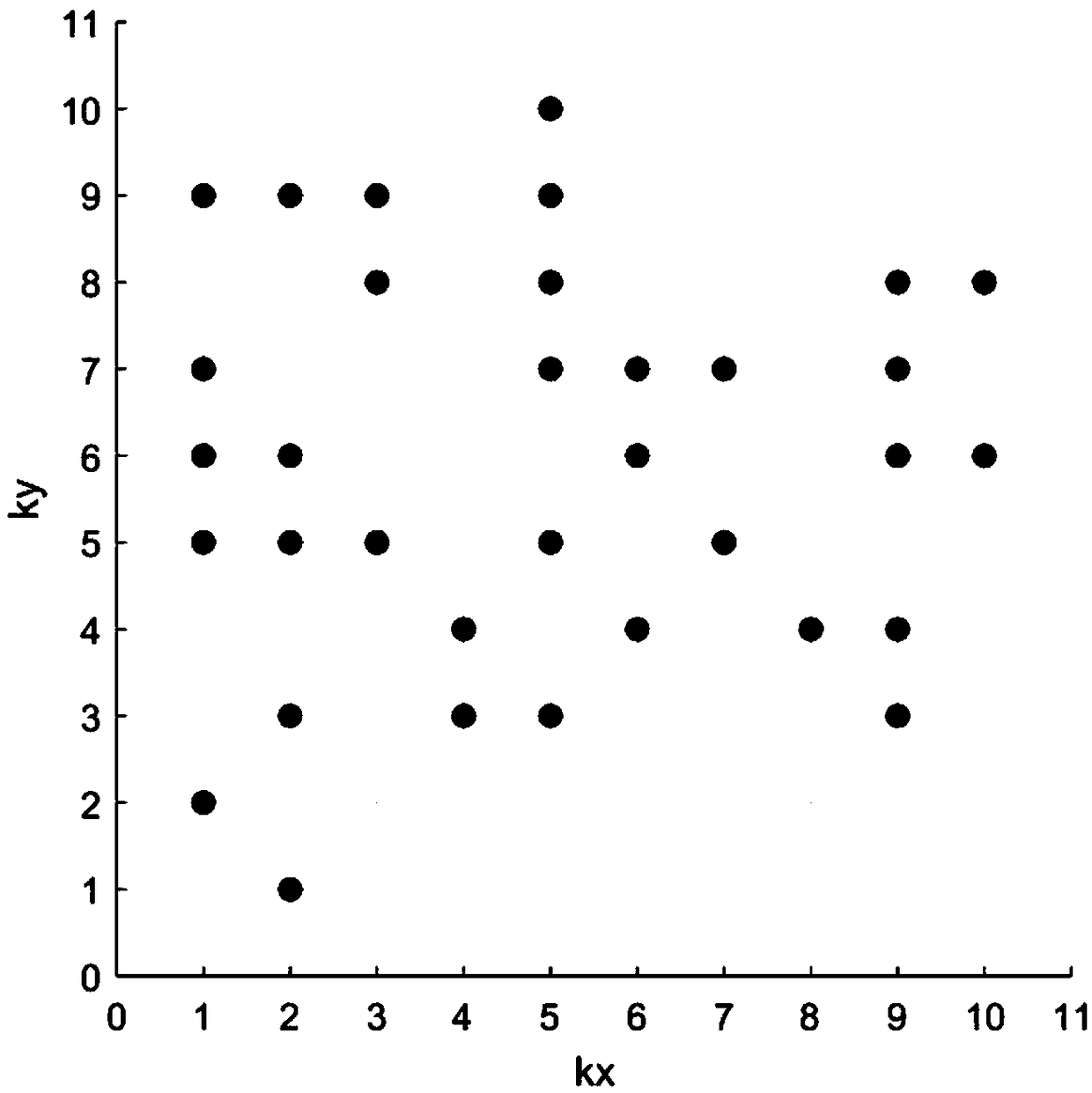
[0069] Step 102 , take a two-dimensional data plane in the determined plane mode, define the requirements of core points, and determine which data points are core points.
[0070] Step 103, the two-dimensional data is merged for the first time. Merge adjacent core points to get the target point. Definition: If the core point P1 with the value (kx1,ky1) and the core point P2 with the value (kx2,ky2) satisfy:
[0071] |kx1–kx2|<=1 and |ky1–ky2|<=1
[0072] Then P1 and P2 merge ad...
Embodiment 2
[0106] The second implementation method provided by the present invention is to directly perform three-dimensional merge processing on the data cube grid data. Figure 8 A schematic diagram of the method flow. The processing method including the merging criterion is directly generalized from the aforementioned two-dimensional merging method. At this time, the data points and the core points participating in the merge are three-dimensional (kx, ky, kz) data. Therefore, the expansion / compression process of step 206 / step 210 is for kx, ky and kz.
[0107] Step 203, the first three-dimensional merge. Merge adjacent core points to get the target point. Definition: If the core point P1 with the value (kx1,ky1,kz1) and the core point P2 with the value (kx2,ky2,kz2) satisfy:
[0108] |kx1–kx2|<=1 and |ky1–ky2|<=1 and |kz1–kz2|<=1
[0109] Then P1 and P2 merge adjacent core points for the first time. The three-dimensional initial merger criteria are as follows:
[0110] 1) Merge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More