

Four-degree-of-freedom helicopter dynamic flight simulator
A dynamic flight and helicopter technology, applied in the simulation devices, simulators, instruments and other directions of space navigation conditions, can solve the problems of reduced motor stability, large cockpit vibration, and the device cannot provide yaw motion, etc., to reduce vibration, reduce Effect of Moment of Inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
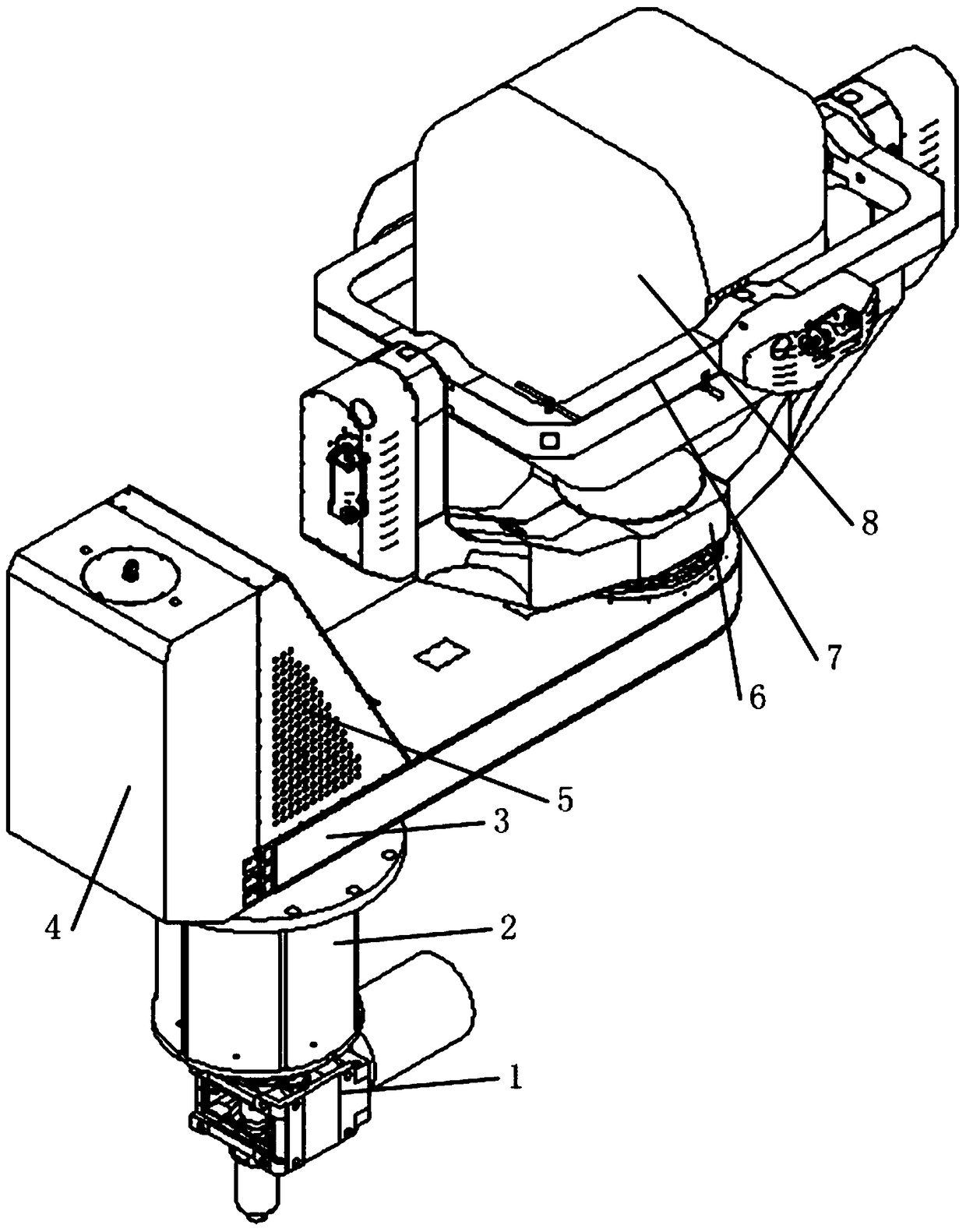
[0044] Example 1, such as figure 1 , figure 2 and image 3 Shown:
[0045] Four degrees of freedom helicopter dynamic flight simulator, including:
[0046] A cockpit 8 for carrying people; the cockpit 8 is used as a part for carrying pilots;
[0047] A pitch drive system for pitching the cockpit 8;
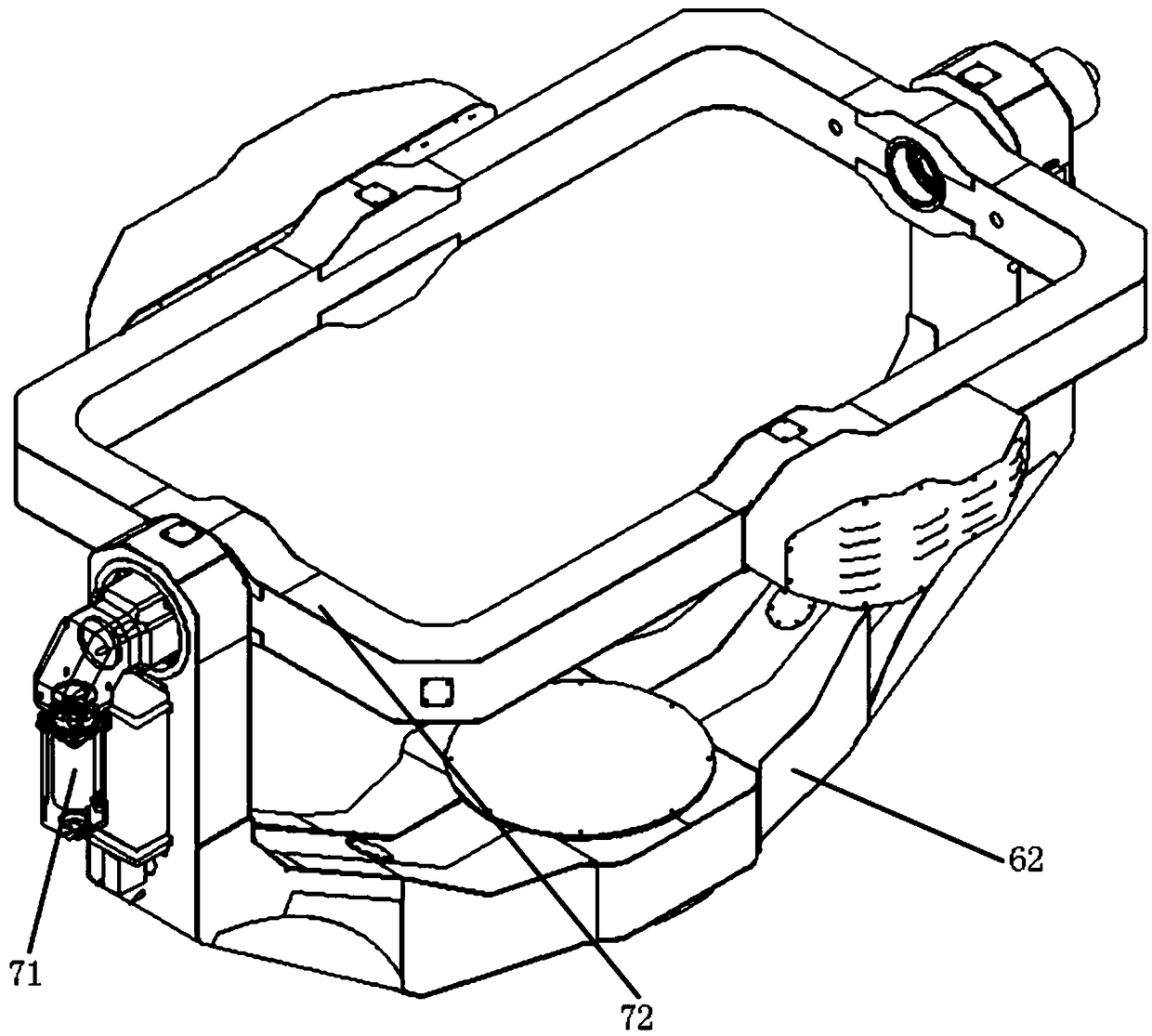
[0048] The rolling unit 7 used for the rolling action of the cockpit 8; the rolling unit 7 includes a rolling drive system 71 and a rolling frame 72, and the cockpit 8 performs a pitching motion in the rolling frame 72 after being connected by a pitching drive system;
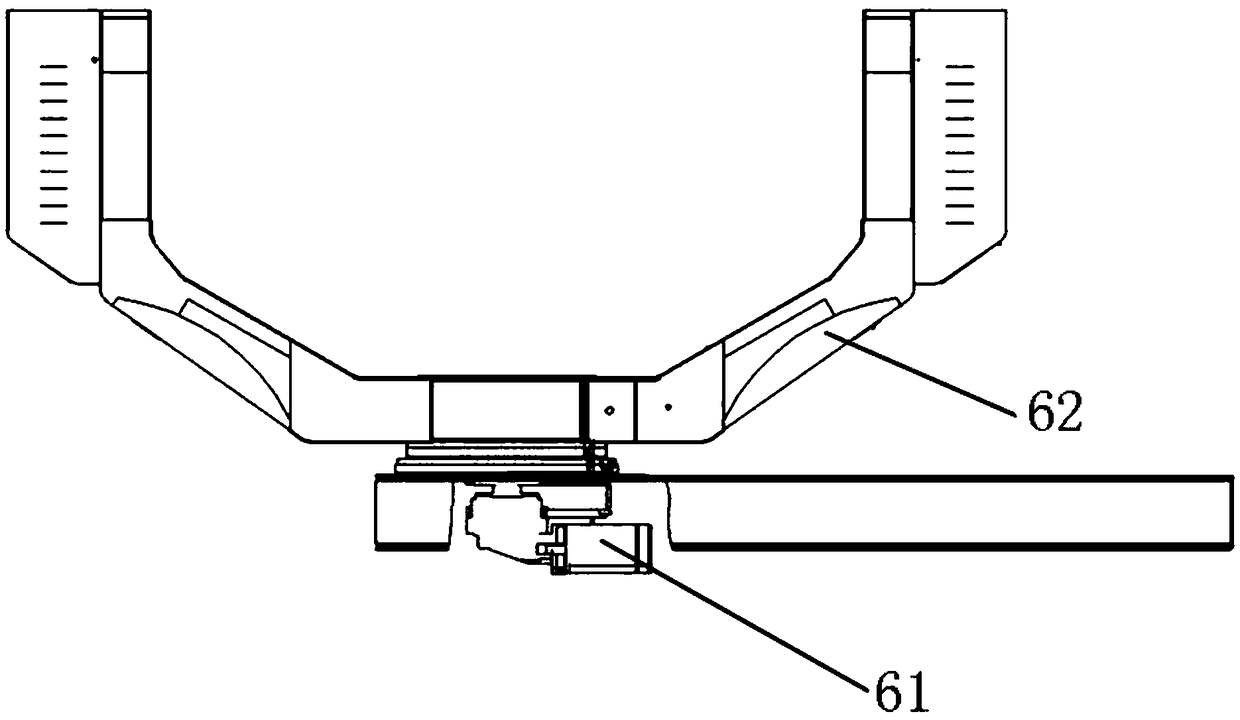
[0049] The yaw unit 6 used for the cockpit 8 to perform yaw action; the yaw unit 6 includes a yaw drive system 61 and a yaw frame 62, and the roll unit 7 performs yaw in the yaw frame 62 after being connected through the yaw drive system 61 sailing;
[0050] The centrifugal unit used to provide centrifugal force for the cabin 8 and make the cabin 8 perform centrifugal action; the yaw unit 6 is connected to t...
Embodiment 2
[0053] Example 2, such as figure 1 Shown:
[0054] The difference between this embodiment and Embodiment 1 is that the centrifugal unit includes:
[0055] Main deceleration motor 1;
[0056] transmission unit 2;
[0057] The rotating arm 3; the power output end of the main reduction motor 1 is connected to the power input end of the transmission unit 2, and the power output end of the transmission unit 2 is fixedly connected to the first end of the rotating arm 3;
[0058] counterweight unit 4;
[0059] The instrument cabin 5 ; the counterweight unit 4 and the instrument cabin 5 are all installed on the upper part of the first end of the rotating arm 3 , and the yaw frame 62 is installed on the upper part of the second end of the rotating arm 3 .
[0060] Among them, the main reduction motor 1 drives the rotating arm 3 to rotate through the transmission unit 2, and the centrifugal motion is transmitted to the rotating arm 3 and the installation parts of the rotating arm 3;...
Embodiment 3
[0061] Example 3, such as figure 1 and Figure 4 Shown:
[0062] The difference between this embodiment and Embodiment 2 is that the transmission unit 2 includes:
[0063] The main shaft 21; the output shaft of the main deceleration motor 1 is connected to one end of the main shaft 21 to transmit torque;
[0064] Bearing system 23;
[0065] Machine base 22; The machine base 22 is fixed on the ground, the two ends sidewalls of the main shaft 21 are connected with the rotating part of the bearing system 23, and the non-rotating part of the bearing system 23 is fixed on the machine base 22; The other end of the main shaft 21 is connected with the rotating arm The first end of 3 is fixedly connected.
[0066] The adoption of the transmission unit 2 prevents the vibration of the main reduction motor 1 from being directly transmitted to the rotating arm 3, resulting in excessive vibration of the entire dynamic flight simulator, and the unbalanced force of the rotating arm 3 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More