

Non-contact air flotation claw device
A non-contact, air flotation technology, applied in the direction of transportation and packaging, conveyor objects, furnaces, etc., can solve the problems of cross-contamination and scratches on glass substrates, achieve simple structure, solve cross-contamination, and stable and reliable transportation process Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
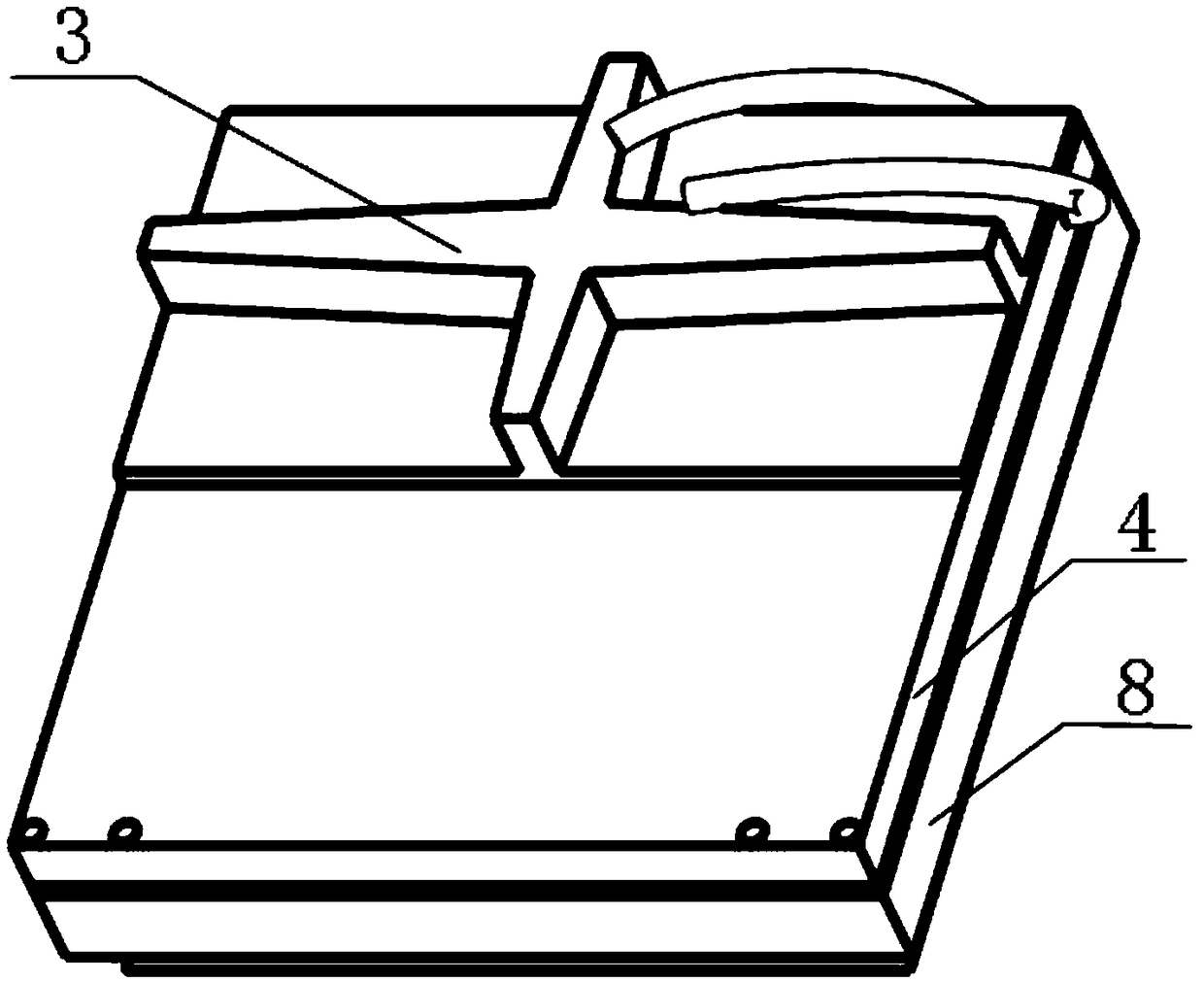
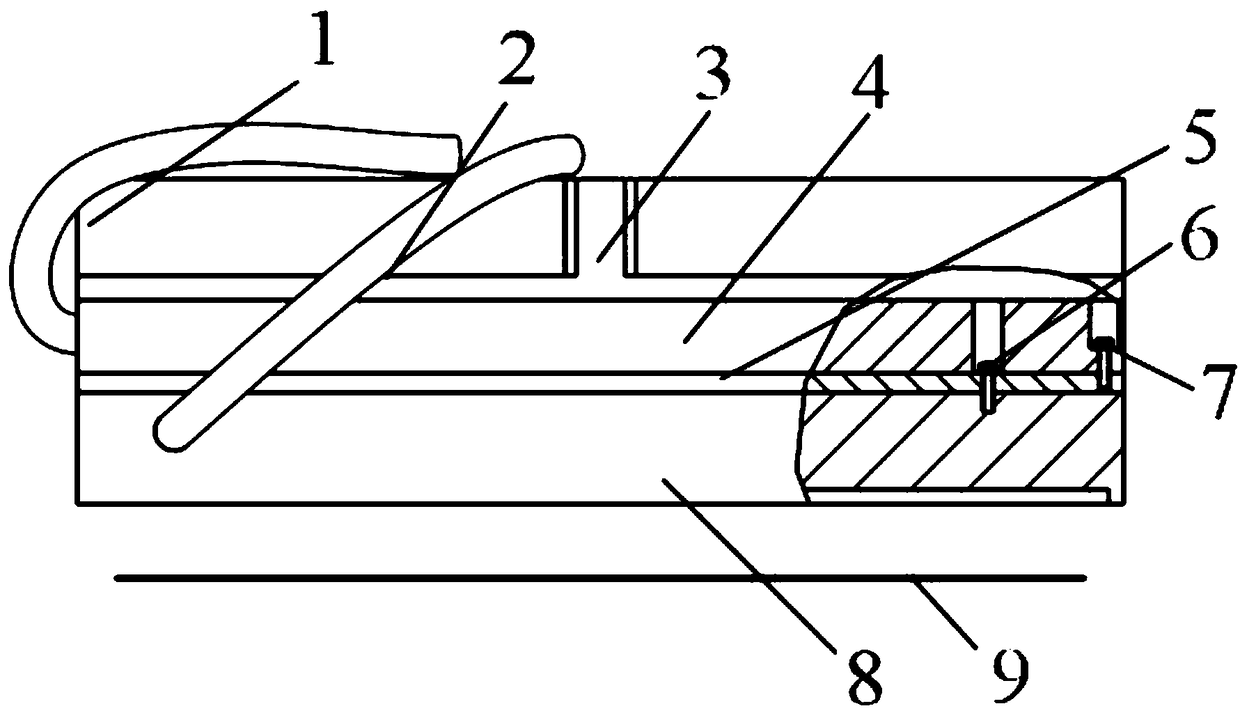
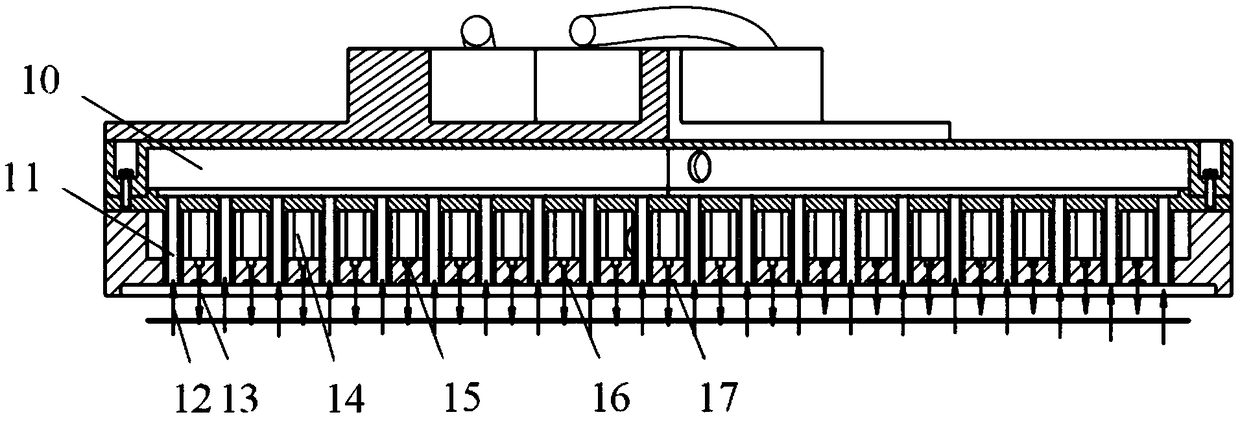
[0030] figure 1 It is a perspective view of an embodiment of a non-contact air bearing claw device of the present invention; figure 2 It is a front view of an embodiment of a non-contact air bearing claw device of the present invention; image 3 It is a cross-sectional view of Embodiment 1 of a non-contact air bearing claw device of the present invention; Figure 4 It is a bottom view of Embodiment 1 of a non-contact air bearing claw device of the present invention. In this embodiment, the non-contact air flotation claw device mainly includes negative pressure air pipe 1, positive pressure air pipe 2, air flotation suction cup adapter 3, negative pressure housing 4, negative pressure adapter plate 5, thread tight Firmware 6, threaded fasteners 7, positive pressure housing 8, glass substrate 9, negative pressure air cavity 10, negative pressure orifice 11, negative pressure air flow 12, positive pressure air flow 13, positive pressure air cavity 14, positive pressure Buffer...
Embodiment 2
[0041] figure 1 It is a perspective view of an embodiment of a non-contact air bearing claw device of the present invention; figure 2 It is a front view of an embodiment of a non-contact air bearing claw device of the present invention; Figure 5 It is a cross-sectional view of Embodiment 2 of a non-contact air bearing claw device of the present invention; Figure 6 It is a bottom view of Embodiment 2 of a non-contact air bearing claw device of the present invention. In this embodiment, the non-contact air flotation claw device mainly includes negative pressure air pipe 1, positive pressure air pipe 2, air flotation suction cup adapter 3, negative pressure housing 4, negative pressure adapter plate 5, thread tight Firmware 6, threaded fastener 7, positive pressure housing 8, glass substrate 9, negative pressure air cavity 20, negative pressure microhole 21, negative pressure airflow 22, positive pressure airflow 23, positive pressure microhole 24, positive pressure Micropo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More