

Multi-line laser radar calibration method
A technology of laser radar and multi-line laser, which is applied to radio wave measurement systems and instruments, can solve the problems of low scalability, low precision, and high precision requirements, and achieve convenient operation, high calibration efficiency, and improved calibration accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments . Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
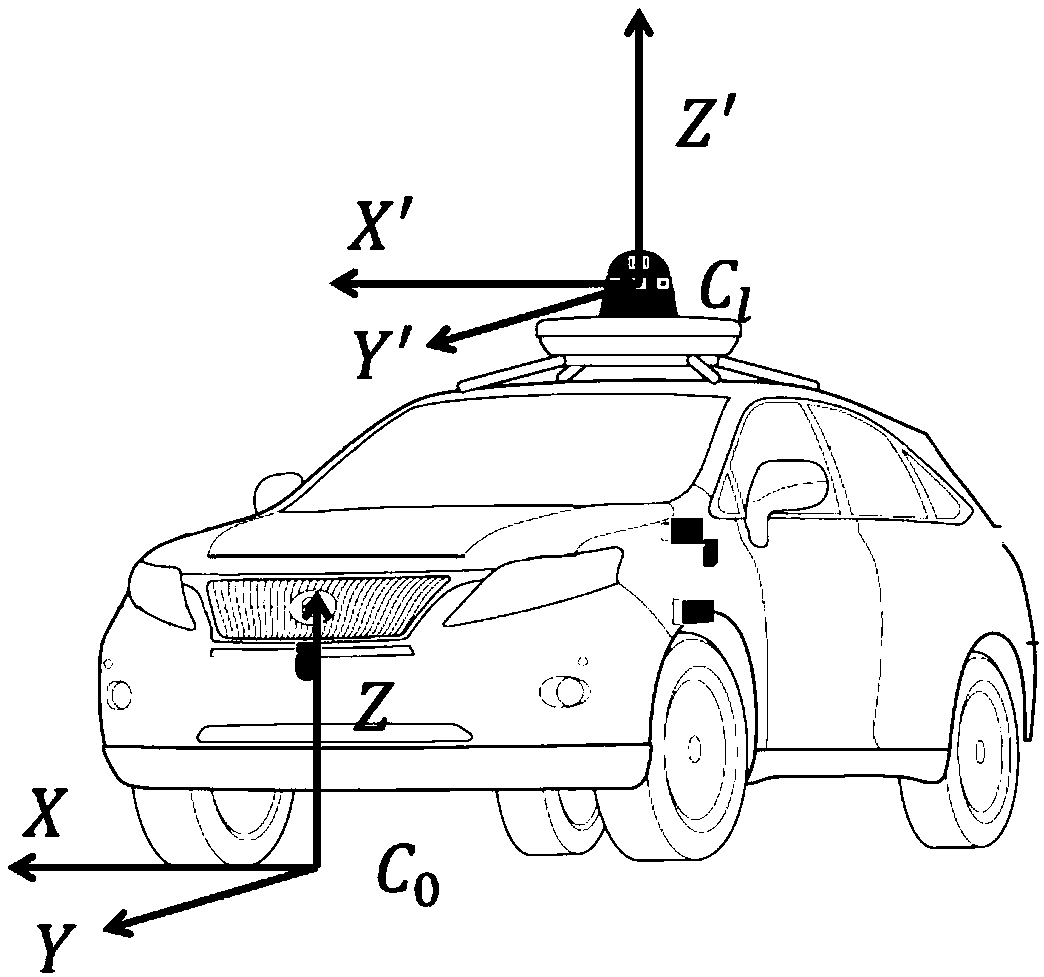
[0051] figure 1 It is a schematic diagram of the relative position relationship of the coordinate system provided by the embodiment of the present invention. Such as figure 1As shown, the lidar coordinate system x′y′z′ is denoted as C l , car body coordinate system xyz denoted as C 0 , the origin of the car body coordinate system is set to the projection point of the center point of the front of the car on the ground, and the xy plane o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More