

A human posture estimation method based on OpenPose and Kinect and a rehabilitation training system
A technology of human body posture and coordinate system, applied in the field of rehabilitation training system, can solve the problems of unrecognized, provided, misidentified, etc., and achieve the effect of improving portability, scalability and easy tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solution of the present invention will be described more clearly and in detail below in conjunction with the accompanying drawings.
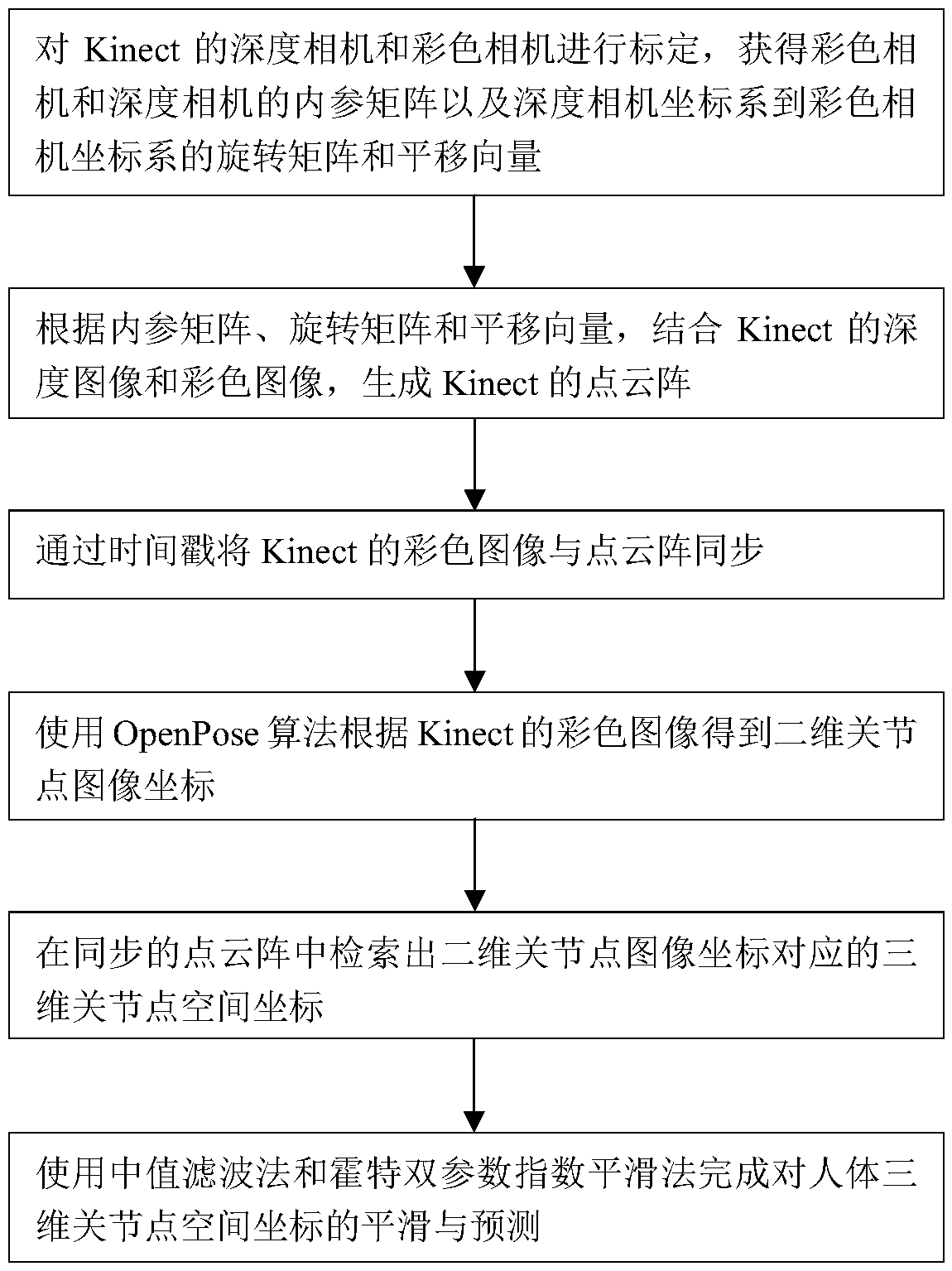
[0062] Such as figure 2 Shown, a kind of human pose estimation method based on OpenPose and Kinect comprises the following steps:
[0063] (1) Calibrate the depth camera and color camera of Kinect, obtain the internal reference matrix of color camera and depth camera and the rotation matrix and translation vector from the depth camera coordinate system to the color camera coordinate system;
[0064] (2) According to the internal reference matrix, rotation matrix and translation vector obtained in step (1), then combine the depth image and color image of Kinect to generate a point cloud array in three-dimensional space;
[0065] (3) The color image of Kinect is synchronized with the point cloud array by time stamp;
[0066] (4) Use the OpenPose algorithm to obtain the two-dimensional joint point image coordinates according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More