

A fully automatic parking control system for parallel spaces of an autonomous vehicle
A technology of automatic driving and parking control, applied in the field of automatic driving vehicle control, can solve the problem of not being able to effectively connect the search vehicle and the parking process, not being completely liberated, and not involving vehicle speed control and gear switching.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
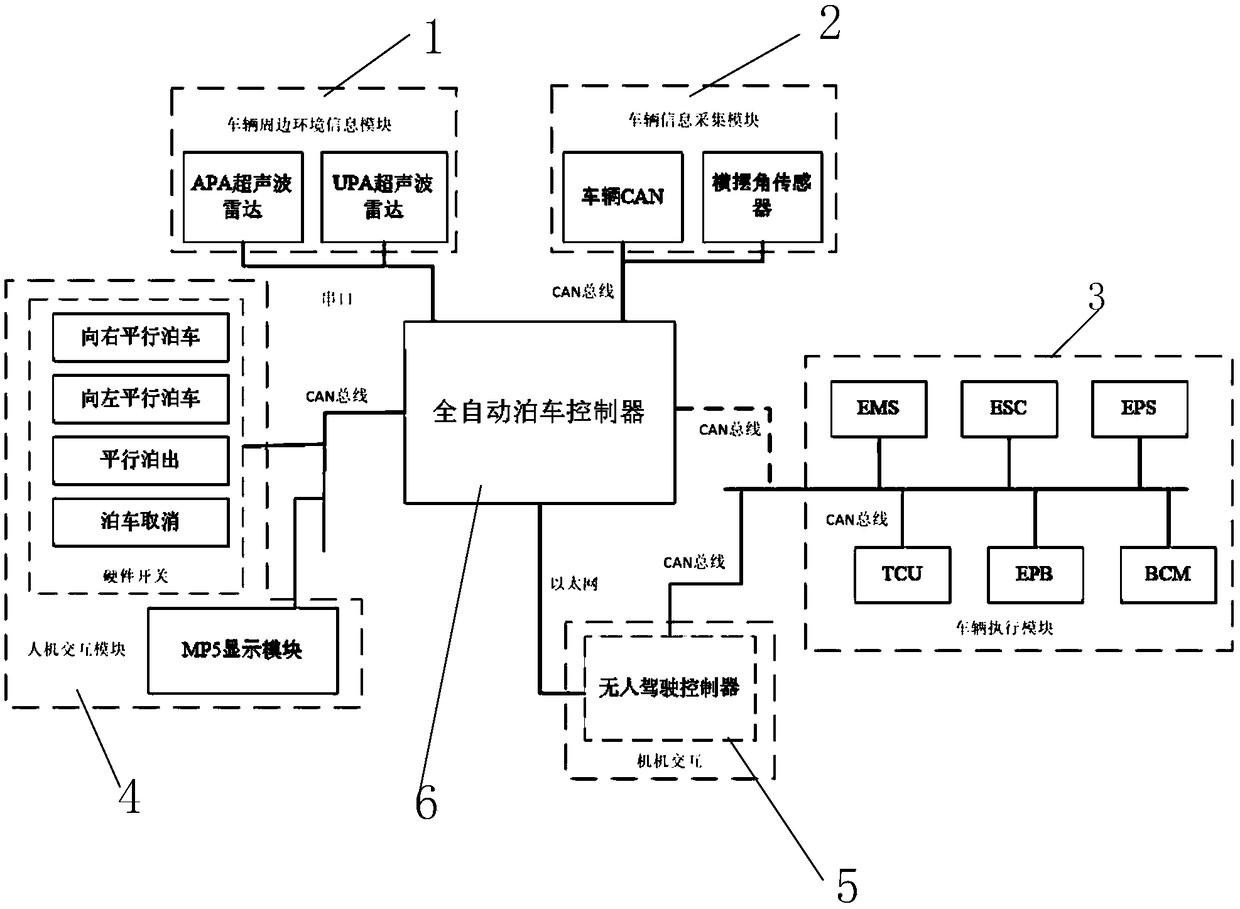
[0050] As shown in 1, the fully automatic parking control system for parallel parking spaces for self-driving vehicles provided in the embodiment of the present invention includes:
[0051] The vehicle surrounding environment information module 1 is used to detect the parking space information and the distance information and angle information of surrounding obstacles relative to the self-driving vehicle;
[0052] The vehicle information collection module 2 collects steering wheel angle signals, vehicle speed signals, vehicle gear signals, electronic parking signals, angle information of the vehicle body relative to the hor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More