

A foot-and-leg bionic robot mouse
A bionic robot mouse and leg-foot technology, applied in the field of bionic robots, can solve the problems of low flexibility and low bionic degree, and achieve the effects of high concentration, strong environmental adaptability and high driving force transmission efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
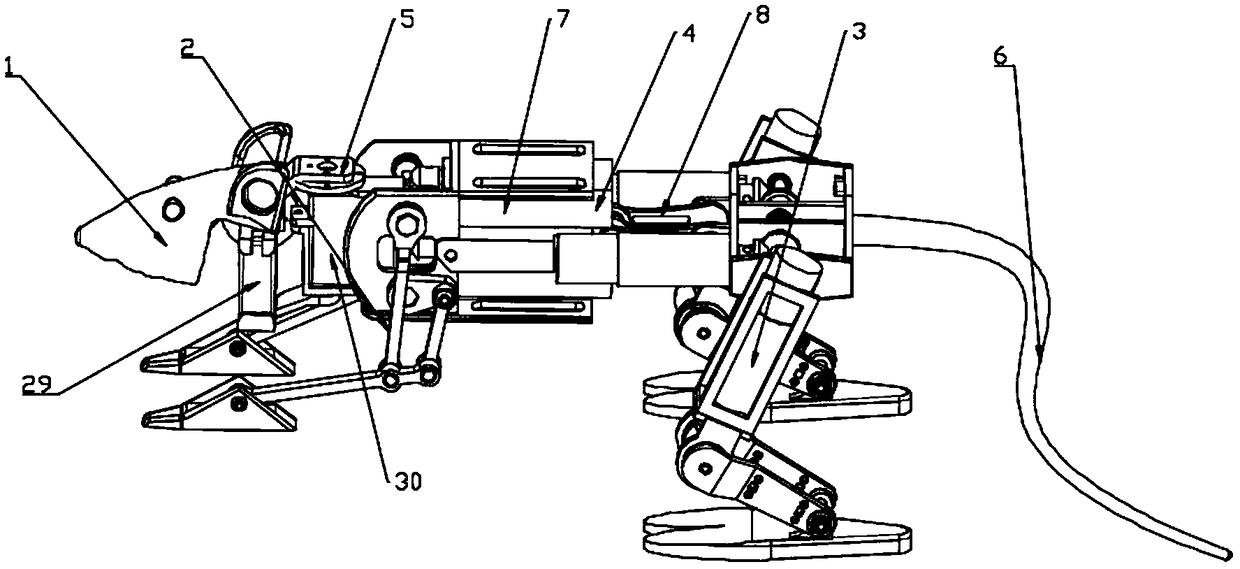
[0027] See attached figure 1 According to the invention, the bionic robotic mouse with legs and feet includes: mouse head assembly 1 , forelimb assembly 2 , hindlimb assembly 3 , waist assembly 4 , neck-forelimb connection assembly 5 , and tail 6 .
[0028] Such as figure 1 As shown, the mouse head assembly 1 is connected to the forelimb assembly 2 through the neck-forelimb connection assembly 5 . The waist assembly 4 includes a large motor bracket 7 and a forelimb-hind limb connecting frame 8. The motor large bracket is hingedly connected with the forelimb-hind limb connecting frame 8 to realize redundant degrees of freedom of the waist and make the movement of the bionic robot mouse more flexible. The forelimb assembly 2 is connected with the large motor bracket 7 in the waist assembly 4; the hind limb assembly 3 is hinged with the waist assembly 4 through the forelimb-hind limb connecting frame 8;
[0029] Such as figure 1 As shown, the mouse head assembly 1 includes a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More