

Truss climbing robot capable of swinging and grasping long-distance truss rod and control method thereof
A technology of truss robots and truss rods, which is applied in the field of climbing truss robots and its control, and can solve the problems of continuous movement of truss structures and the inability to reliably grasp distant truss rods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
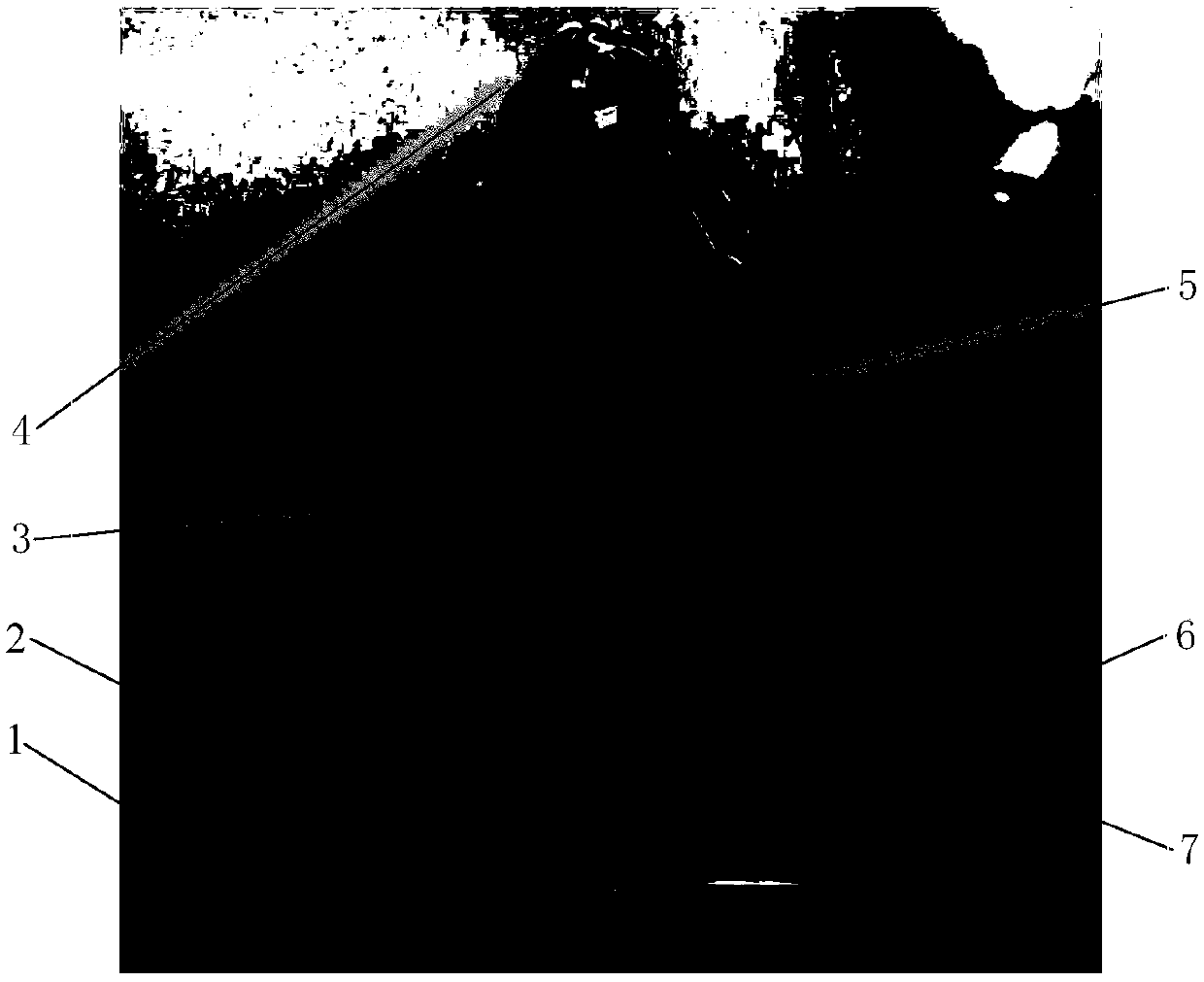
[0096] Specific implementation mode one: as Figure 1~4 As shown, the improved climbing truss robot in this embodiment includes a first gripper 1, a first wrist joint 2, a first connecting rod 3, an elbow joint 4, a second connecting rod 5, a second wrist joint 6 and a second Claw 7, the first claw 1 is rotatably connected to one end of the first connecting rod 3 through the first wrist joint 2, and the other end of the first connecting rod 3 is rotatably connected to one end of the second connecting rod 5 through the elbow joint 4. The second hand claw 7 is rotationally connected with the other end of the second connecting rod 5 through the second wrist joint 6; the first claw 1 and the second claw 7 are the same part, and the first wrist joint 2 and the second wrist joint 6 are the same Parts, the first connecting rod 3 and the second connecting rod 5 are the same part. The first wrist joint 2, the elbow joint 4, and the second wrist joint 6 are all composed of a DC servo m...
specific Embodiment approach 2
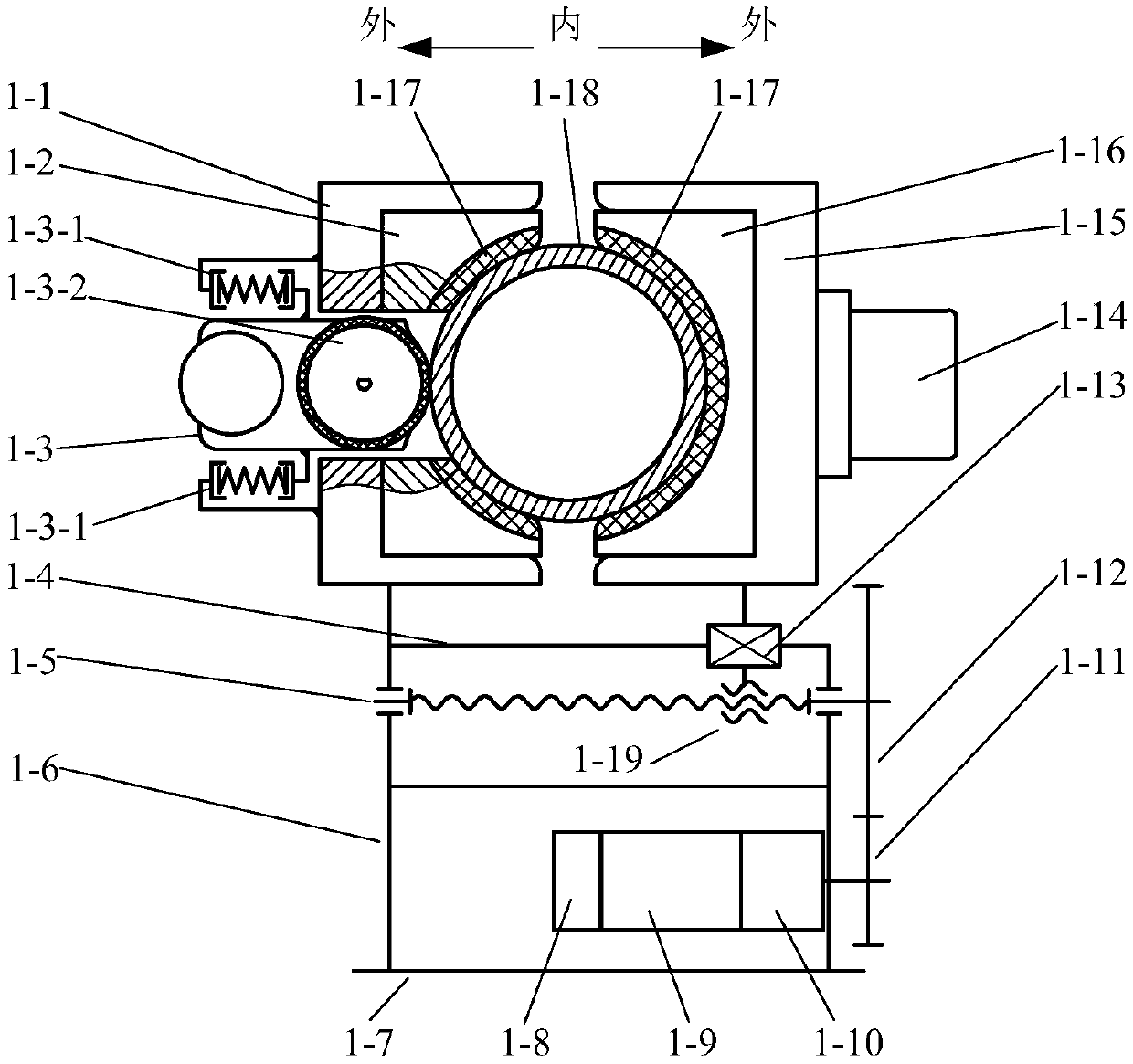
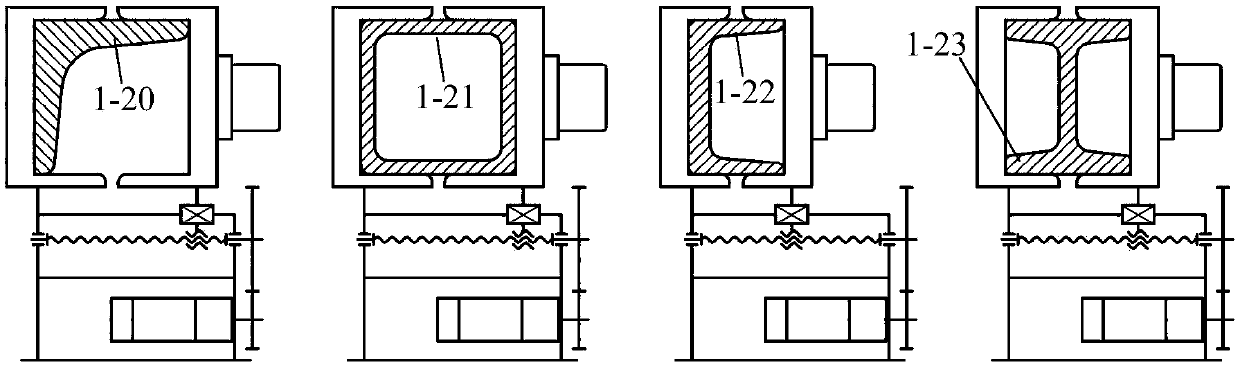
[0098] Specific implementation mode two: as figure 2 , 3 As shown, when the truss rod to be grasped is a truss rod 1-18 with a circular cross section, the opening and closing claws of the robot can be respectively loaded into the fixed half claw 1-1 and the moving half claw 1-15. Claw bushing 1-2 and moving claw bushing 1-16, and different friction materials 1-17 can be selected according to the material and surface roughness of the truss rod 1-18. For large rubber materials, the wear-resistant silicone material can be used to grasp the hard and rough surface, and the asbestos layer with good chimerism can be used to grasp the soft uneven surface such as cables. For truss rods with 90° corners such as angle steel 1-20, square steel 1-21, channel steel 1-22, and I-beam 1-23, the fixed claw bushing 1-2 and movable claw bushing can be removed Cover 1-16, using the rectangular slots on the inside of the fixed half-claw 1-1 and the moving half-claw 1-15 to grasp. The rectangula...
specific Embodiment approach 3
[0099] Specific implementation mode three: as Figure 5 As shown, the control system of the climbing truss robot is composed of the host computer and the servo motor control / driver of the first gripper 1, the first wrist joint 2, the elbow joint 4, the second wrist joint 6, and the second gripper 7 , the upper computer communicates with the master node servo control / driver that drives and controls the DC servo motor 1-9 in the first gripper 1 through the USB interface, and the master node servo control / driver communicates with other servo control / drivers through the CAN bus, each The servo control / driver corresponds to a DC servo motor. The upper computer can also install a CAN-PCI board on the PCI slot, through which it can directly communicate with all servo controllers / drivers. The friction wheel retreat feedback mechanism 1-3 on the robot claw feeds back the rotation angle θ of the photoelectric encoder shaft inside it, the gyroscope 1-14 feeds back its own rotational ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More