

Terminal iterative learning connection control method
An iterative learning control and iterative learning technology, applied in the field of terminal iterative learning docking control, can solve problems such as control lag, large amount of calculation, and over-control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] Here, taking the docking control of drogue tube-drogue sleeve aerial refueling as an example, the terminal iterative learning docking control method is designed.
[0082] The simulation process is carried out on a computer with a main frequency of 3.4GHz, a memory of 8.00GB, and MatlabR2016b under win7 environment.
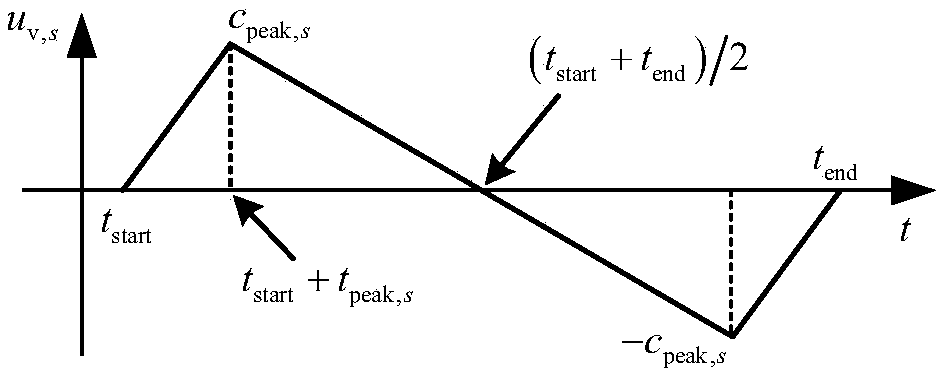
[0083] During the docking mission, the tanker keeps flying forward at a constant speed, and the receiver plane approaches the tanker by maneuvering to achieve docking, and then conducts combined flight. The tanker is a KC-135 aircraft, and the oil receiver is an F-16 aircraft. It is the state of the docking system composed of the tanker and the receiver, and the output y=[x e the y e z e ] Tis the distance between the tanker and receiver in the x, y, z directions, and the control input is u=[δ T δ a δ e ] T ,δ T ,δ a ,δ e Input for receiver throttle, aileron and elevator. In the simulation, the docking speed is Butt height is t start =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More