

Intelligent navigation micro-system based on ROS and control method thereof
An intelligent navigation and micro-system technology, applied in the field of navigation, can solve problems such as limitations, single function of the mobile robot platform, and reduced environmental adaptability of the navigation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
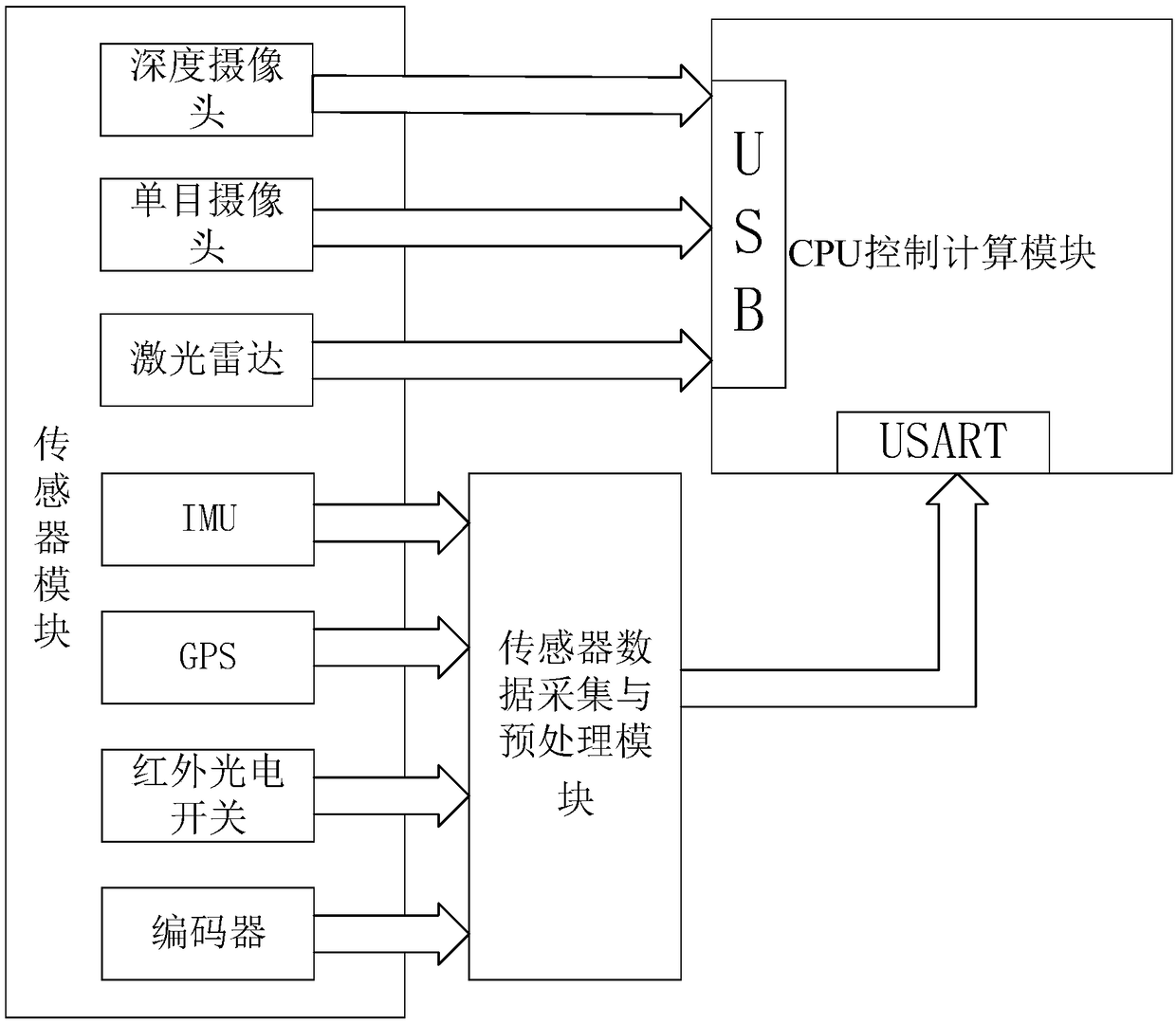
[0027] combine figure 1 , a kind of intelligent navigation microsystem based on ROS described in the present invention, comprises CPU control calculation module, sensor module and sensor data acquisition and preprocessing module; Sensor module includes lidar, depth camera, monocular camera, infrared photoelectric switch, IMU nine-axis gyroscope, GPS and encoder; laser radar, depth camera and monocular camera directly send the collected data to the CPU control calculation module through the USB interface, the data of IMU nine-axis gyroscope, GPS, infrared photoelectric switch and The encoder is collected by the sensor data acquisition and preprocessing module for data integration and preprocessing, and the processed data is sent to the CPU control computing module through the serial port communication interface; the CPU control computing module equipped with R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More