

Block selection method and device for sweeping robot
A sweeping robot and block technology, which is applied to robot cleaners, manual sweeping machines, carpet cleaning, etc., can solve the problems of prone to missed sweeps and low cleaning efficiency, and achieve the effect of avoiding missed sweeps and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
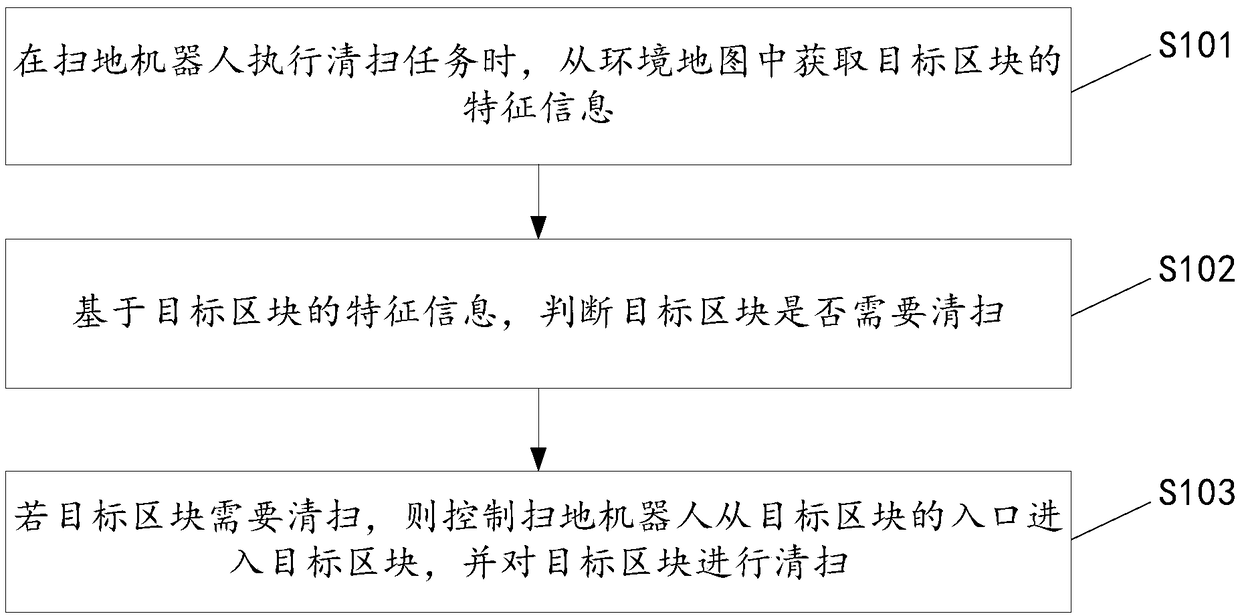
[0075] This embodiment provides a method for a sweeping robot to select a block, which is applied to a sweeping robot, such as figure 1 shown, including:
[0076] Step S101: When the sweeping robot performs the cleaning task, the characteristic information of the target block is obtained from the environment map. The environment map is stored in the sweeping robot, the feature information of multiple blocks is stored in the environment map, and the target block belongs to the multiple blocks.
[0077] In the specific implementation process, the sweeping robot can automatically clean every room in the house. When it is used for the first time, the cleaning robot will be initialized, specifically, it will explore and drive the entire house, using various sensors it carries (such as acceleration sensors, gyroscopes, ultrasonic rangefinders, cameras, etc.) Explore each room, sense the location, shape and size of each room, as well as the location, shape and size of the obstacles...
Embodiment 2
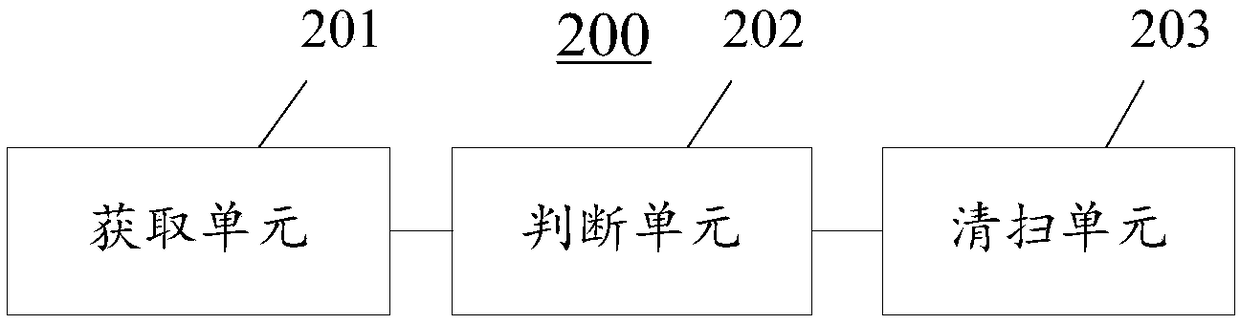
[0119] Based on the same inventive concept, such as image 3 As shown, this embodiment provides an apparatus 200 for selecting a block for a cleaning robot, including:
[0120] The obtaining unit 201 is used to obtain the feature information of the target block from the environment map when the sweeping robot performs the cleaning task. Feature information, the target block belongs to the plurality of blocks;
[0121] Judging unit 202, for judging whether the target block needs to be cleaned based on the feature information of the target block;
[0122] The cleaning unit 203 is configured to control the cleaning robot to enter the target block from the entrance of the target block and clean the target block if the target block needs to be cleaned.
[0123] As an optional embodiment, the obtaining unit 201 is specifically configured to:
[0124] Determine the first area to be cleaned of the target block in the environment map, and calculate the area information of the first ...
Embodiment 3
[0145] Based on the same inventive concept, such as Figure 4As shown, this embodiment provides an apparatus 300 for selecting a block for a cleaning robot, including a memory 310, a processor 320, and a computer program 311 stored in the memory 310 and running on the processor 320, and the processor 320 executes the computer Procedure 311 implements the following steps:
[0146] Obtain the target rich media advertisement template selected by the user, and the target rich media advertisement template corresponds to a preset animation special effect; obtain the advertisement material uploaded by the user, and the advertisement material contains the relevant information of the product to be promoted; The material is fused with the target rich media advertisement template to obtain a rich media advertisement with the preset animation special effects.
[0147] In a specific implementation process, when the processor 320 executes the computer program 311, any implementation manner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More