

Localization and control system of underwater vehicle based on surface relay equipment
An underwater robot and relay equipment technology, which is applied to satellite radio beacon positioning systems, underwater operation equipment, radio wave measurement systems, etc., can solve the problem of reducing the operating range of underwater robots, large position errors, and poor mobility of the mother ship and other problems, to achieve the effect of improving energy supply mode, increasing operating time, and improving the scope of activities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
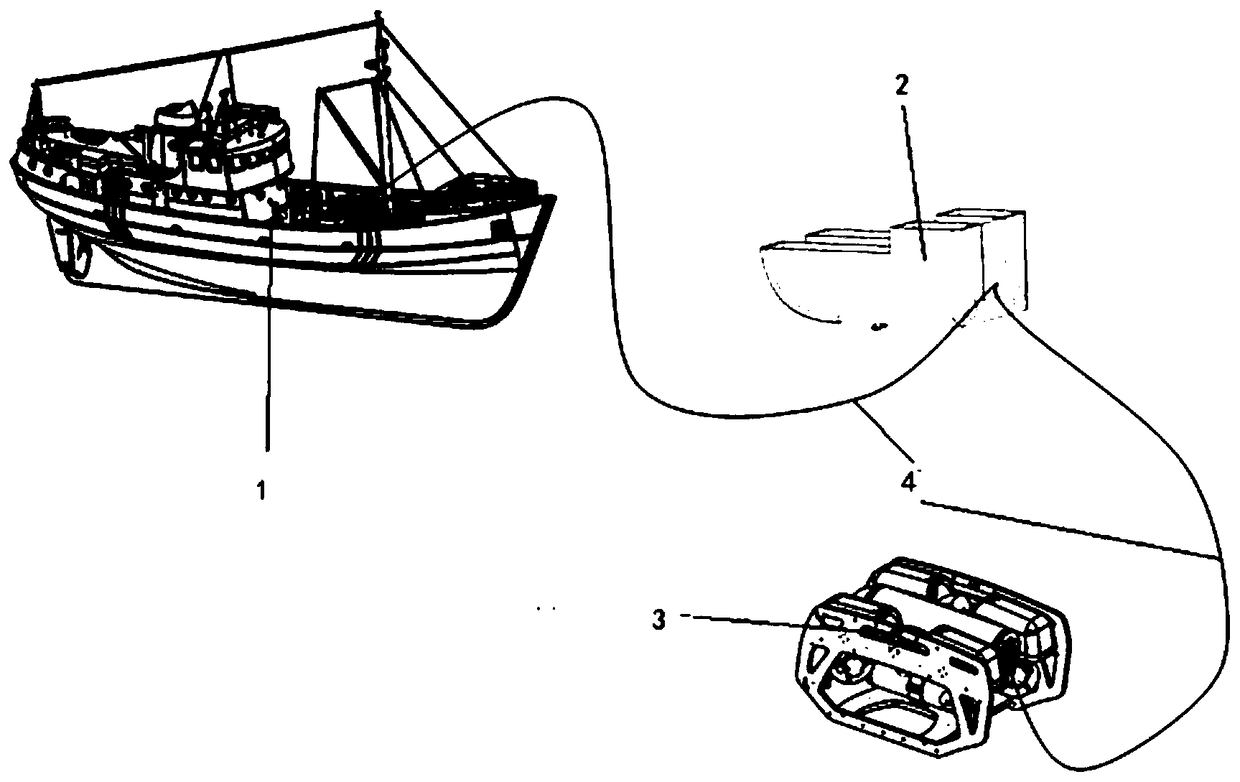
[0030] Please continue to see figure 1 As shown, the specific device of the underwater robot positioning and control system assisted by surface relay equipment provided by the present invention preferably includes a mother ship 1, an underwater robot 3 and a relay device 2; the relay device 2 is arranged on the mother ship 1 and the underwater robot. Between the robots 3 ; the relay device 2 is connected to the underwater robot 3 through a cable 4 , and the relay device 2 is connected to the mother ship 1 through a cable 4 .
[0031] Preferably, the cable 4 connecting the relay device 2 and the underwater robot 3 is a zero-buoyancy cable. Preferably, the relay device 2 is equipped with a power supply, and the power supply is connected to the first control system with a signal, and the first control system controls the power supply to provide energy to the underwater robot 3 through a zero-buoyancy cable.
[0032] Preferably, the detection means include down-looking sonar and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More