A redundant manipulator repetitive motion planning method based on Euler discrete periodic rhythm neural network
A technology of neural network and repetitive motion, applied in the direction of biological neural network model, neural architecture, special data processing applications, etc., can solve the periodic noise interference of redundant manipulators, the difficulty of implementing periodic rhythmic neural networks, and the repetitiveness of redundant manipulators Problems such as motion planning failure, to achieve the effect of easy implementation and periodic noise suppression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below.
[0024] The present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
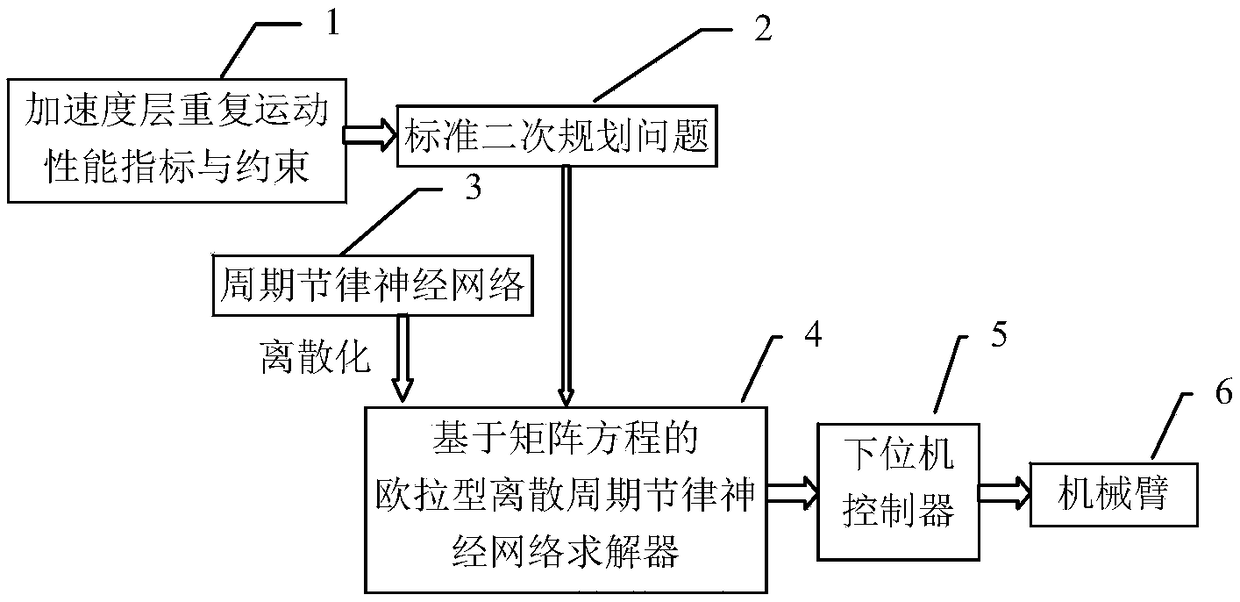
[0025] This embodiment provides a redundant robotic arm repetitive motion planning method based on Euler-type discrete periodic rhythmic neural network, the flow chart of which is as follows figure 1 as shown,
[0026] figure 1 It is a flow chart of the repetitive motion planning method of the redundant manipulator based on the Euler type discrete periodic rhythm neural network in the embodiment of the present invention. It can be seen from the figure that the repetitive motion planning method of the redundant manipulator in this embodiment mainly includes the acceleration layer Repetitive motion performance indicators and constraints 1. Standard quadratic programming problem 2. Periodic rhythm neural network discretization 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More