

Collision-avoidance system for autonomous-capable vehicles
A technology for automatic driving and collision avoidance, which is applied in the field of collision avoidance systems for automatic driving vehicles, and can solve problems such as adverse effects of sensors and automatic driving system performance, challenges posed by automatic vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
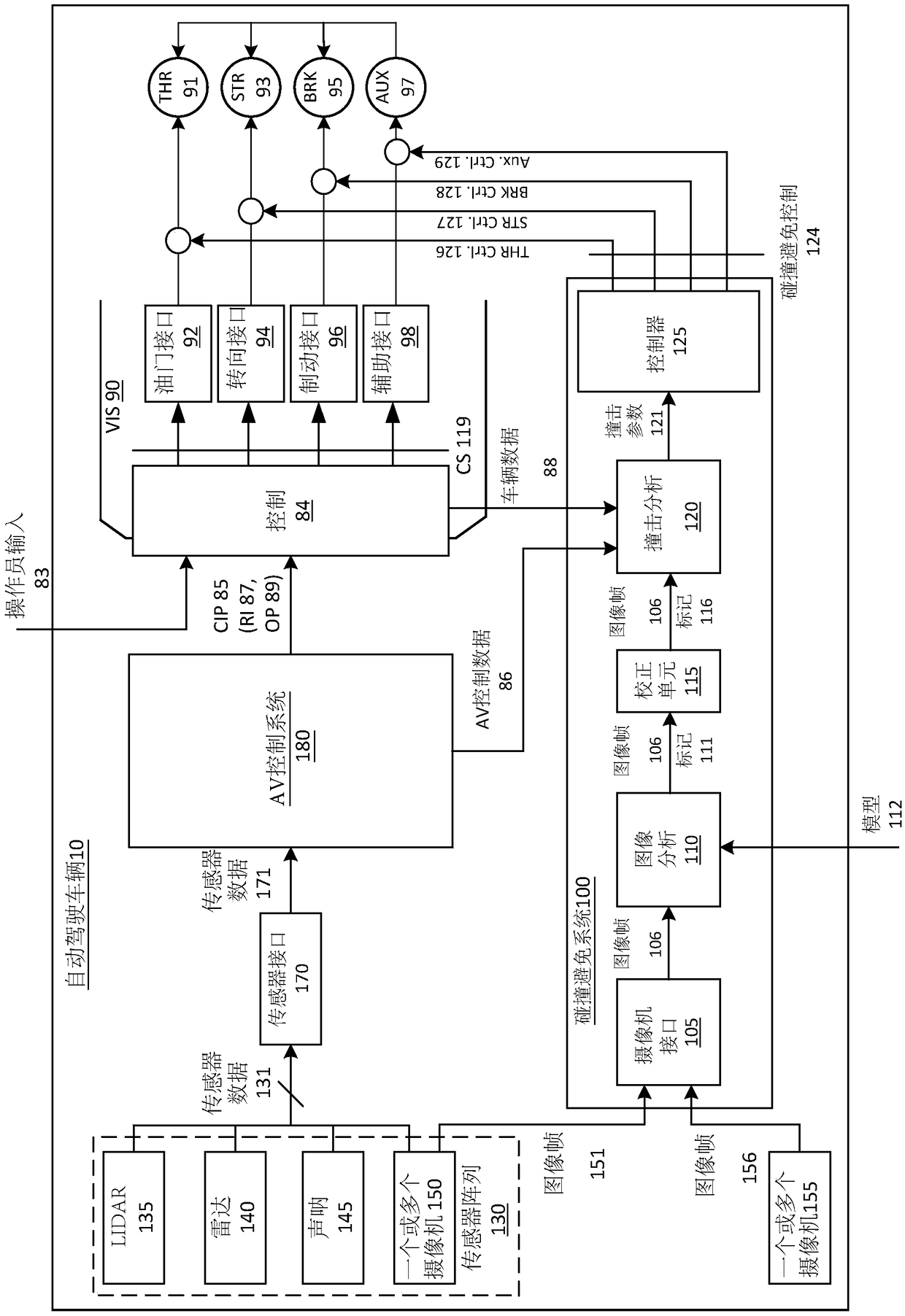
[0094] As described herein, an autonomous vehicle (referred to as a "vehicle" for simplicity) is capable of operating in automatic, semi-autonomous, or manual modes. In an automatic or semi-autonomous mode of operation, the vehicle's control system can operate the vehicle with no or limited human operator input. For example, the control system may apply the accelerator to accelerate the vehicle, may steer the vehicle, may apply the vehicle's brakes, and may operate auxiliary functions of the vehicle (eg, activate hazard warning lights). In these modes of operation, the control system receives sensor outputs from the sensor array to generate vehicle control signals to operate the vehicle. The sensor array may include light detection and ranging (Light Detection and Ranging (LIDAR)) sensors, one or more cameras, radar sensors, sonar sensors, and the like. The sensors in the sensor array enable the control system to detect obstacles, vehicles, pedestrians, cyclists, etc. on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More